
See 610’s Engineering Notebook >
Record: 46 – 11
Granite State Regional Champions
Waterloo Regional Finalists
Galileo Division Champions
World Champions
Introduction
When Team 610 started over 15 years ago, it was simply a robotics club where students could join together to build a robot over six weeks. Over the years, our team has grown in size and spirit, and has expanded not only within our school, but also into the greater Toronto community. Our team’s passion for engineering has led us to develop handicap-friendly technologies for the children of Sunnyview School, incorporate FIRST-related activities in our school’s many tech design courses, and annually host both FLL and VEX tournaments, to spread our love of FIRST with the community. Beyond our school doors, we have taken on the challenge of mentoring teams with limited FIRST experience. To our team, robotics programs serve as essential factors in bringing people from all grades and cultures together, to collaborate and celebrate the scientific and technological achievements of Canada, and the rest of the world.
Major Systems
As of the BAE Granite State Regional
Drivetrain
Designed By: Ryan Tam 11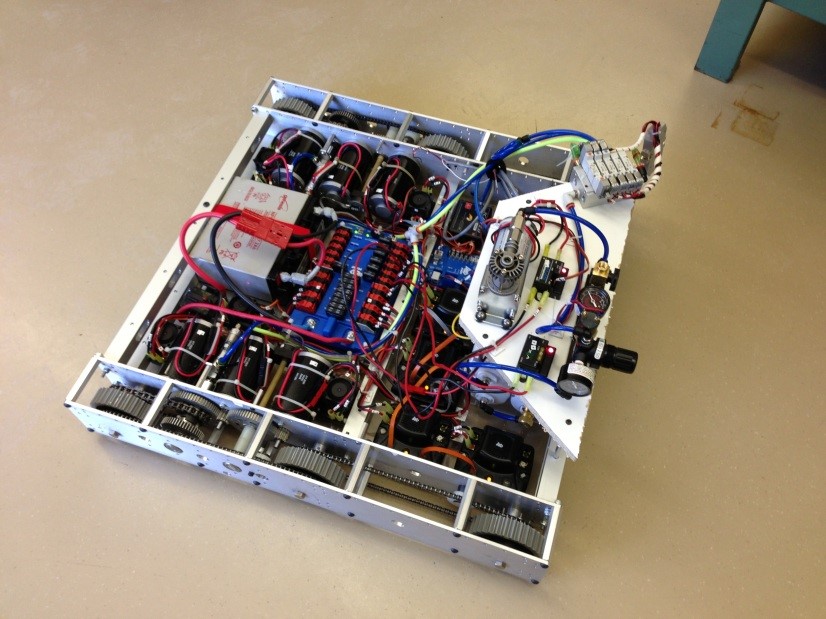
- Six wheel drive
- 4” AndyMark HiGrip Wheels
- 6 CIMs geared 5:1 with 8:5 sprocket reduction for over all of 8:1
- Top speed: 9ft/s
- Acceleration: 6ft/s2
- Optimized for moving between Pyramid and Feeder station (36ft) apx. 4 seconds
- 2 sets of #25 chain + 1 set of #35 for Power Takeoff
- Custom Aluminum Chassis & Gear Box
- Max Pushing force: 130lb
- Stall torque: 100Nm
- Power Takeoff (removed post BAE)
- 0.1” rocker
- Weight: 50lbs
Shooter
Designed By: Austin Bianchini 12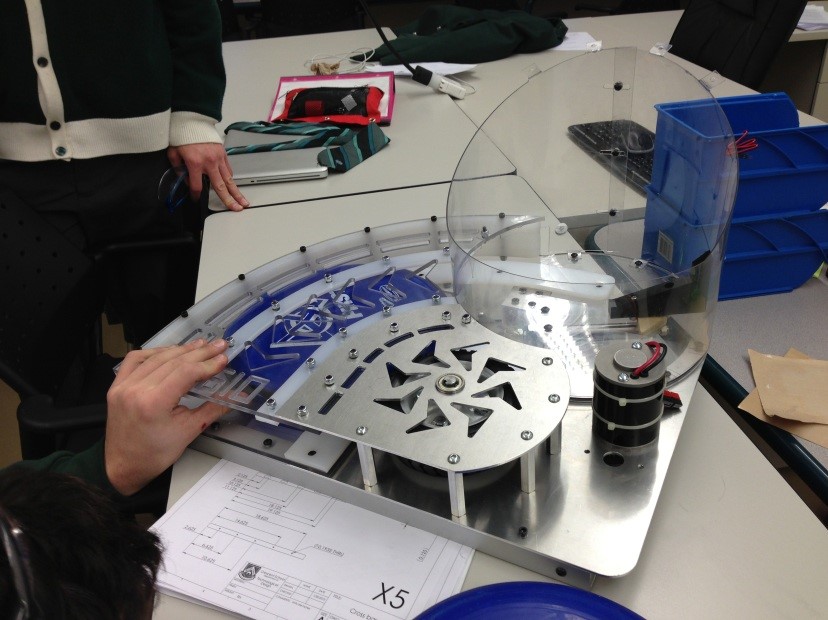
- 0.25” Lexan polycarbonate & 1/8 Aluminum housing
- Powered by 1 Mini CIM motor
- Driven by timing belt
- ¼ circle shooter design
- 0.5” disc compression
- 6” pneumatic wheel
- Recovery time < 1.2 s
- Pneumatically fed
Hanger
Designed By: Ryan Tam 11
- Two dual acting 5” stroke pistons
- 1.25” bore
- 100 lbs. lifting force each @ 60psi
- 2 hooks positioned above center of gravity to prevent swinging
- Machined from 6061 Aluminum
- Sub second hang + alignment time
Sub–Systems
Feeder
Designers: Jonathan Lau 11; Jamie Rose 11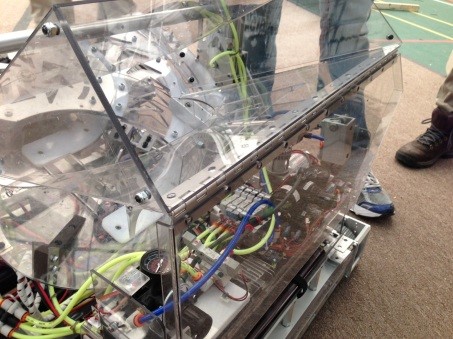
- 1/16” Lexan polycarbonate construction
- Pneumatic indexer
- Delrin “doorstop” prevents discs from jamming
Flip-out Tray
Designers: Jake Fisher 11; Ryan Tam 11; Taran Ravindran 11
- 1/8” Lexan polycarbonate construction
- One dual acting 4” stroke piston to retract and extend
Variable Shooter Mount
Designed By: Ryan Tam 11
- Two dual acting 4” stroke pistons
- 15 degree & 30 degrees
Additional Info
- Encoder on drivetrain for accurate autonomous movement
- Optical sensor on shooter to control rpm (“custom” encoder)
- Microsoft Kinect for automated infrared goal tracking
- 3 layer electrical panel
- Onboard compressor + 4 clipper air tanks
- 2 pneumatically actuated “bunny ears” pop out as hard stops for Pyramid alignment
- Possible ground intake system with improved autonomous
Taz’s Scouting Information
Autonomous
- Positioned behind the pyramid, centred
- Can also be positioned at side of pyramid
- Possible 5-7 disc autonomous (ground intake pending)
- Scores 3 discs in 3pt goal – >90% accuracy (3 seconds)
Teleoperated
- Shoots from behind the pyramid, centred
- >90% shooting accuracy in the 3pt goal
- Can drive to feeder station, load 4 discs, drive to pyramid, and shoot them in under 16 seconds
End-game
- Level one hang in 3 seconds
- Can shoot discs while hanging at the back of pyramid
- ~75% shooting accuracy while hanging from level oneDrivetrain
Robot Related Videos
Pre-Championship Highlight Video
Final Match of the 2013 Championship
