Einstein Drivetrains in the Modern Era FIRST Robotics Competition (FRC)
First let me define the “modern era” of FIRST as all games starting from and including the 2005 game “Triple Play”. All games since this include two alliances of three robots competing against each other. In 2014, a forth robot was added to all elimination alliances that could be rotated into play at any time, essentially a picked “back-up” bot.
Disclaimer: This post (despite the first image, which is a joke) is not meant to provide data on which drivetrain is the best, but provide historical data on drivetrains that have played on Einstein.
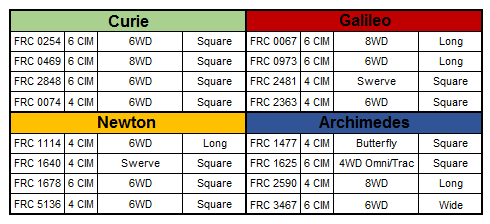
2014 Einstein
So, what happened in 2014? Below are all 16 teams that make up the winning alliances from there respective fields. The trend continues that tank drivetrains (4WD, 6WD, 8WD) are in the majority representing over 80% of the robots to touch the World Championship field. Also of note for 2014 the integration of 6 CIM drivetrains is becoming more and more common, with 50% of the teams opting to run the extra CIMs.

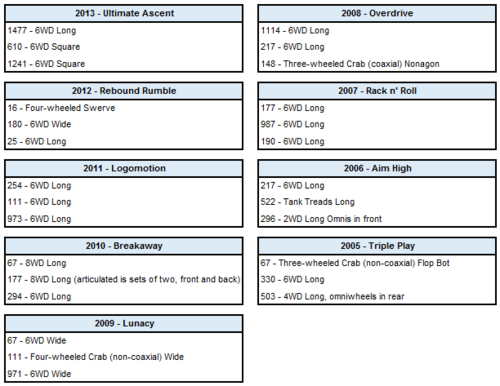
Additional Historical Data
Below is the historical data for the Einstein from 2005 through 2013 showing the winners of each year along with their drivetrain of choice and relative chassis configuration. You will notice by this data that over the previous nine years there have only been 4 out of 27 robots running an alternative configuration to tank drive.
How should this impact you
This data was provided as a reference for a question that comes up often on the robotics web forums as well as many internal team questions. We do not suggest using this data as justification for any particular drivetrain selection for you and your team. Your drivetrain is the 1st, 2nd, and 3rd most important parts of your robot each year, and should be designed based on the team strategy for any given game. It is extremely important to quantitatively evaluate all options to ensure that the best solution is chosen.
The term quantitative refers to a type of information based in quantities or else quantifiable data (objective properties) —as opposed to qualitative information which deals with apparent qualities (subjective properties).
Ultimately every drivetrain design has its own associated pros and cons and it is up to the individual teams to determine and qualify them. We urge teams to evaluate and re-evaluate their design choices to determine their basis in fact or in something they have read to be popular. Strategic design should determine drivetrain design, drivetrain design should not dictate a robots intended strategy.
Article Content Provided by: Justin Foss

[…] Northwest [SA] District Stats: Indiana FIRST [SA] District Stats: FiM [SA] Strategy By Numbers [HL] Einstein Drivetrains [PR] West Coast Products Colson […]