Team 3467’s robot is the product of much design work and strategic analysis. After analyzing the game, we realized several key elements which drove our design process. These elements were the likelihood of heavy defense due to each alliance having a single ball and the importance of being able to work well with other robots in order to achieve a high ranking and score the maximum amount of points.
In order to prepare for heavy defense, we designed our robot with two intakes so that we could retrieve balls faster, and not be incapacitated if one intake was destroyed in heavy defense. Also, we realized that defensive robots would be able to easily block shooting robots at close range, so we designed our shooter to be able to score from a wide range of places as well as dump in the one point goal by making its angle and power easily adjustable during a match. Also, we designed our shooter to be able to shoot out of both sides of the robot in order to prevent the need to turn completely around.
Because of the need for alliance partners to be able to work well with each other in this year’s challenge, we designed our robot to be able play virtually any element of the game aside from goalie, which we deemed as an ineffective strategy due to the blocker size limitations. To quickly escape defense and to play defense ourselves, we designed our drive base to have two speeds and 6 CIM motors. Our double sided intake also improves our ability to work with other robots because we can pass through our robot to another robot without risking losing possession of the ball or wasting time. The double sided intake also increases our catching area, allowing us to receive the ball from the human player more reliably as well as to catch a truss shot of reasonable accuracy. We designed our shooter to be able to gently place a ball on top of another robot on our alliance to aid in assists and to be reliable in order to avoid losing time chasing missed balls.

Team 3467’s 2014 drivebase is a highly optimized subsystem that is the pinnacle of our efforts over the past four years building off of our successes and failures. In the fall of 2013 our team discussed the pros and cons of systems we have used in the past noting parts we loved, disliked, and items we wanted to see in the future. After researching solutions we decided that the best method for our team was one that was highly reliable, easy to maintain, can adapt to any game, and was designed to be built off of. After kickoff our team examined the 2014 kit chassis provided to teams from AndyMark and noted that while it was a successful drive system it lacked many of the features we were looking for.
Knowing our analysis of Aerial Assist would require a drivebase that could push through defenders but still be agile & fast we decided to build a six wheel drive base with VexPro 3 CIM Ballshifters giving us speeds of 6FPS and 14FPS in a highly efficient setup. For our wheels we chose 4” Colson wheels due to their good reputation in industrial, hobby, and FRC applications. These wheels give us a high amount of traction coupled with low wear properties. To decrease unique part counts and increase simplicity we duplicated our center wheel setup through the outer wheels including color-coded spacers allowing us to freely exchange parts between wheels and two robots. By calculating the exact number of chain links we would need, we spaced our wheels perfectly as to require no chain tensioning method even after the chain breaks in. Through the use of 3d CAD software our team designed a plate drive that utilized 1/8in 6061 aluminum sheet to create the main drive module with the cross members from the kit chassis connecting it all together. By using .236in Lexan as our belly pan, it greatly increases the structural integrity of our frame while providing a solid platform for mounting our electrical components. Through the use of a standard 3/16in hole pattern we ensure all sub-teams have a unified system for buildup off of. We integrated cutouts in outside plates and belly pan so we can quickly remove a gearbox from our robot allowing for decreased down time and ease of maintenance. The manufacturing was optimized for our team using new machining techniques in house as well as student operation of CNC mills and router at our sponsor’s facilities.
Overall the system has proved to be one of our finest drivebases in 4 seasons providing us with all the features and reliability we desired combined with an easy to manufacture design. After we built the system there were a few small areas that we iterated. For increased maneuverability we shaved down our outer wheels to give us better turning as well as to decrease the friction or “scrub” as it is called. By taking down the wheels we have achieved a slight “drop” allowing us better handling and increased efficiency.
SPECS:
- 6 wheel drive tank design
- 4” Colson wheels for traction and low wear properties
- 3 CIM Ballshifters for speed and efficiency
- Geared for 6FPS and 13FPS
- Evenly spaced chain runs for reliability and low maintenance
- Duplication of parts among all wheels for lower unique part counts
- Integrated hole pattern allowing for easy mounting
- Designed to accept 3 different gearboxes
- Completed weight of 40lbs
Intake
With every game challenge comes the important aspect of gaining and retaining possession of the game piece. Due to this year’s challenge limiting the number of game pieces each alliance can have, we put a high priority on our ball pickup mechanisms. Our goal was to create a “One Touch” mechanism that could pull the ball in from a variety of angles & situations to decrease time spent acquiring our game piece and more time scoring and assisting with our partners. With tough gameplay in mind, we knew that whatever mechanism we extended outside of our frame perimeter would need to be strong to take a beating.
Looking to previous years for guidance, our team found ourselves looking back to a successful system used by FRC Team 16 The Bomb Squad that utilized a large roller extended out from their robot and pivoted to bring the ball up and into their robot. We quickly prototyped and iterated this mechanism with much success and moved on to integrating it into our design. As our shooter began to take shape we realized that if we designed our pickup correctly we could integrate a second pickup mechanism on the back of our robot to shoot multiple balls in autonomous, pass through our robot, quickly acquire a ball, and if one pickup became damaged in a match we would switch to use the other as the primary.
As the physical design in CAD began to form we used processes from our 2012 robot as the structural reference in the design. We use 1” x 1” x 1/8” 6061 Aluminum box tubing as the main frame of the intake using 1/8” water jet 6061 Aluminum gussets to provide the connection. We made custom inserts that are press fit into the ends of the base tube with 22 tooth sprockets attached that allow us to pivot the entire intake outside of our frame. Each pivot is powered by a RS775 Banebots motor through a 100:1 gearbox with a 22:12 chain reduction and controlled via potentiometers to maintain the angle. At the end of the tubes we are using 3” Banebots wheels to contact the ball and bring it in to our robot driven by a Bag motor through a 40:1 gearbox and use gears to transfer the power to the roller. To not violate the 20” frame perimeter rules we have Delrin standoffs mounted to the bottom of the pickup that rest on our bumpers and provide a mechanical stop to ensure we satisfy the rules.
To ensure the two pickup arms and shooter arm do not interfere or collide with each other all three are uniquely connected via software we call “Shway”. Shway is a custom program that keeps the intake rollers far enough from the shooter so that we can shoot, retract our shooter, and move the pickup and shooter in unison without overloading our operator. This software features keeps all mechanisms out of each other’s way and helps the operator do more with less focus on where each mechanism is in relation to each other and allows more time to focus on the field. Individually addressable LEDs mounted inside the uprights of our intakes provide visual feedback of the shooter’s position in relation to set shooting angles using a color coded system allowing all members of the driveteam to see current positioning.
SPECS:
- Dual sided intake
- Capable of putting balls back down on the field
- Quick ball control
- Mechanical stop to satisfy 20” extension limit
- Pivoted via RS775 100:1 VP 24:12 Chain Reduction
Shooter
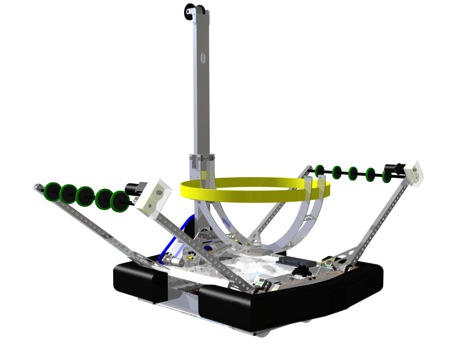
Based off of our analysis of the game we determined we would need a shooter that was adjustable to shoot from various distances and powers to allow us a high powered shot for long 10 point shots into the high goal as well as a softer power to pass to our partners and safely eject a ball from our control. After some initial prototypes we regrouped and ran some calculations as to what we needed to acclerate a ball to score from our target distance of 18 ft from the 10 point high goal.
With our target set we calculated that if we used a 40lb constant force spring and accelerated the ball over a distance of 24inches we would generate enough energy to launch the ball into the goal. After some brainstorming the shape of the shooter began to form settling on a design that would have a mast of 1” x 3” x 1/8” aluminum 6063 box tubing with a carriage for the ball to sit in. With safety in mind we decided to mount our 40lb constant force spring at the top of the mast, running down the center of the tube. This made the design much simpler, safer, and increases the efficiency of the system. To accomplish our task we knew we would need to make our ball carriage as light as posisble to ensure no energy was wasted in acccelarting weight we did not need. We decided to make the main ball basket out of two pieces of waterjet 1/8” 6061 aluminum that provides an excellent body. These “tusks” as we call them are connected via homemade sheetmetal brackets for strength while remianing extremely light. A “ring” made of 1/8” Lexan spans around the ball holding it in place but remains flexible to withstand rough game play. At the connection to the mast we are using steel ball bearings on all four sides of the mast to increase efficiency to maximize the energy of the spring. After intial tests that proved our concept we added a 2” wide yellow seatbelt strap that sits under the ball and is pulled tight at the time of release which allows us to transer more energy into the ball. The entire shooter sled is pulled down via a cable that runs up the center of the mast. This cable is connected to a custom gearbox that puts tension on the spring when it pulls down and released to fire. To angle our shot, pickup a ball, or throw over the truss we use an RS550 Banebots motor through a 132:1 reduction gearbox to a 60:12 sprocket reduction controlled via a potentiometer to pivot our shooter and hold its position.
SPECS:
- Powered by a 40lb Constant Force spring
- Accelerates ball over 24in
- Efficient ball bearing carriage
- Utilized seatbelt strap to maximize energy transferred to the ball
- Capable of shooting in a wide array of positions
- Multiple powers for long distance shots, truss catch, low goal, and safe releases.
- Can shoot both forward and backwards
- Completed weight of 12.5lbs
Winch and Brake
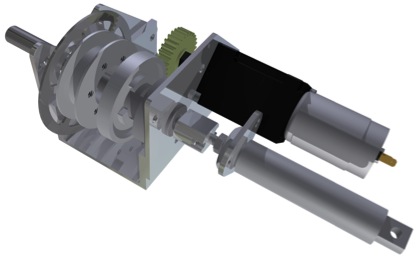
To control our shooter we needed a reliable system that could release the stored energy of our 40lb Constant Force spring in our shooter quickly and more importantly be extremely safe so as to not release prematurely. To release the energy quickly a shifting gearbox that shifted between a driven stage and a neutral stage was decided upon so we could pull our shooter down putting it under tension before shifting to neutral to release. A concern developed that we could potentially damage the dog gear over time while shifting into neutral as for quick moment when the gear is still just barely engaged and under tension of the spring. With these in mind we brainstormed the idea of using a bike brake integrated with the gearbox to mechanically lock the spool that our cable was wrapped around. This would accomplish two tasks: first it we could use it to lock our shooter in the down position and second would allow us to shift with no load on the dog gear.
To make our winch gearbox we started by calculating that in order to pull our shooter down in under a second it would require an RS775 Banebots motor through a 10:1 reduction provided by a Versaplanetary gearbox followed by a 48:24 gear reduction. To shift between neutral and driven gears, we took the dog shifting mechanism from an AndyMark Super Shifter and repackaged it into a smaller footprint via 6061 aluminum U channel and waterjet side plates. The last piece of the winch gearbox is the custom spool that the cable is wound around. A flange on the side of the spool provides the surface for which the bike brake can clamp down on to hold the spool in position locking the shooter. Coming from the bike brake is cable that runs to mechanical linkage activated by a Bimba pneumatic piston. The piston pulls down on the cable while pushing the linkage past it’s pivot point at the same time. This action pulls the cable tight and activates the brake. By pushing the linkage past its pivot point the linkage can only be pushed back by the pressurized piston. This means that even if all air pressure were to leak out of our robot the cable is locked in position and will only release the bike cable when pressure is restored and the solenoid is activated.
Together the winch gearbox and brake system work in unison to release the energy quickly but more importantly they safely control the energy of the Constant Force spring, shooter sled, and cable.
SPECS:
- Custom gearbox for small foot print
- Custom aluminum spool to maintain cable
- Integrated bike brake to lock shooter
- Safely stores and releases energy
- Completed Winch Gearbox weight of 4lbs
- Completed Brake weight of 3lbs

Very nice design. Thank you very much for the write up. I would like more info on the air brake you are using for the winch. If you could fwd any cad drawings or photos, it would be greatly appreciated.
P. Ry