
Background information on FIRST Overdrive
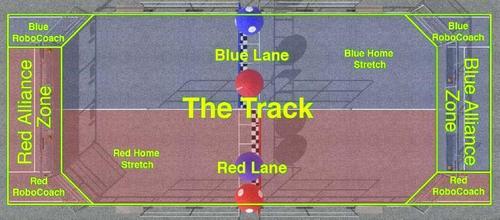
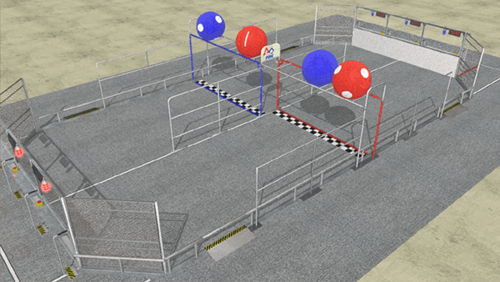
The 2008 Game: FIRST Overdrive was played on a 54 ft (16 m) by 27 ft (8 m) carpeted field, divided lengthwise by a fence median to create a track, and separate the field into Red and Blue zones. The fence was crossed by an overpass marking the red and blue finish lines, and hold the game pieces: 40 in (1,016 mm) diameter inflated balls called “Trackballs”. Two three-team alliances raced around the track in a counter clockwise direction while manipulating the trackballs to score points. The game was made up of two scoring periods. The first 15 seconds of play is the Hybrid period in which robots are autonomous, and may also respond to certain digital signals sent by team members designated as “Robocoaches”, who are stationed at the corners of the track. The next two minutes of play is the Tele-operated period. At this time, robots are fully radio controlled by the team operators standing at either end of the field.
During the Hybrid period, robots traveling in a counter clockwise direction score:
- 8 points for each of their Trackballs knocked off of the overpass
- 8 points for each of their Trackballs passed over the overpass
- 4 points whenever their robot crosses a lane marker
- 4 points whenever their robot crosses their opponent’s finish line
- 4 points whenever their robot crosses their finish line
- 2 points whenever their trackball crosses their finish line
During the Tele-operated period, robots traveling in a counter clockwise direction score:
- 2 points whenever their robot crosses their finish line
- 2 points whenever their Trackball crosses their finish line
- 8 points whenever their Trackball hurdles their overpass
- Alliances score an additional 12 points for each of their Trackballs that are positioned anywhere on the overpass at the end of the match.
What’s a “Lap Bot”?
A “Lap Bot” is exactly that, a robot that chooses to focus the majority of the match on running around the field as fast as possible during both autonomous/hybrid and tele-operated control in order to maximize their point potential. While the ceiling for this strategy of scoring is lower, teams choosing to focus on this were guaranteeing themselves points. Now it is important to understand that nearly every team is capable of running laps, what differentiates this archetype is that the robots are specifically designed for speed, efficiency, and control as they zip around the field.
For a lap bot to be successful they must take advantage of the scoring system in autonomous/hybrid mode, racking up as many line crosses as possible. Typically these robots are smaller and highly maneuverable giving them a distinct advantage in this portion of the game. It was not uncommon for a top tier “Lap Bot” to score greater than 4 (a whole lap), some teams even managed multiple laps.
Below is some information on two of the teams who decided to completely ignore the “Trackballs” and build robots designed to turn as many laps as possible in a given match, sometimes playing a little defense or knocking balls off of the truss overpass.
FRC102 – The Gearheads – “ORION”

Their official season results boasted a 15-19-1. The robot went on to garner nicknames like “Plungy” and “Speedy”. They picked up a Judge’s award at the New Jersey Regional, and came home with a Blue Banner from the SBPLI Regional after pairing up with FRC2487 and FRC2010 and playing from the #6 spot. At the World Championships they became the first team to win the FIRST Finale Asphalt Race, a robotic drag race, and was crowned the fastest FIRST robot in the world. Below is some basic stats on “ORION”:
- 18″ x 16″
- 48.2 lbs (w/ bumpers and battery)
- Geared for 30ft/s
- Mecanum Drive (4 CIM)
FRC148 – Robowranglers – “Tumbleweed”

Tumbleweed was driven to an impressive record of 41-9-0. After ranking #1 at the St. Louis Regional they picked up FRC217 and FRC830 in the draft and swept the elimination rounds to pick up a Blue Banner. They then went on to rank #2 at the Bayou Regional and selected FRC118 and FRC49 and ended up as Regional Finalists. While they did not rank nearly as high a the World Championships in qualifying, they paired up with the Galileo Division and eventual World Championship winning alliance with FRC1114 and FRC217. Here are the available stats on “Tumbleweed”:
- 9 Sided Chassis (Neun-agon)
- ~80lbs (rumored)
- Geared for 20ft/s
- 3 Wheel Swerve (4CIM/2FP)
What can we Learn?
Evaluation of the scoring system, and prediction of average match scores can greatly effect a teams design strategy. It is paramount to fully evaluate this every year. Every year teams overestimate both their ability, and their alliances ability to score. You can see below the data on actual match scores in 2008. It was not uncommon for FRC148 to average 30+ points a match by themselves.
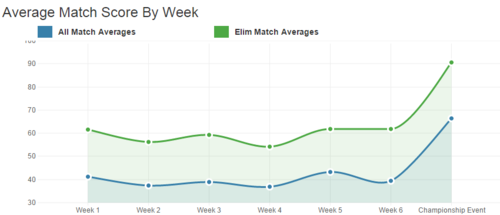
Average Match scores from The Blue Alliance.
On the other side of the coin, you must take into account game piece availability. Each alliance was only provided two “Trackballs”, and each alliance has three robots. This means that at any given time, one robot is likely to have zero interaction with a game piece. When analyzing a game try to take the time to determine the different archetypes which will be present at your events, and how they fill the roles in the game and match strategy. For reference the typical archetypes for the 2008 game were: Arm Hurdlers, Shooting Hurdlers, and lap bots. Typically a winning alliance consisted of one of each.
There is absolutely no shame in not picking the glamorous rule. In fact in some years (2008 especially) designing a robot to “exploit the rookie strategy” or being a “support robot” will land you must closer to a Blue Banner. Proper evaluation of a teams resources and abilities is a topic for another article, but remember: “A jack of all trade is a master of none”
Article Content Gathered/Provided by: Justin Foss (FRC558 Mentor)

[…] Strategy [EA] A Diner’s Guide to FRC [EC] Suffield Shakedown 2015 [EA] 2015 Robot Archetypes [HL] Strategy Review: Lap Bots (2008) [SA] 2015 Ranking: Visualization [SA] 2015 Ranking: QA vs. QS [RP] Ultimate Utility – FRC67 […]