The State Machine
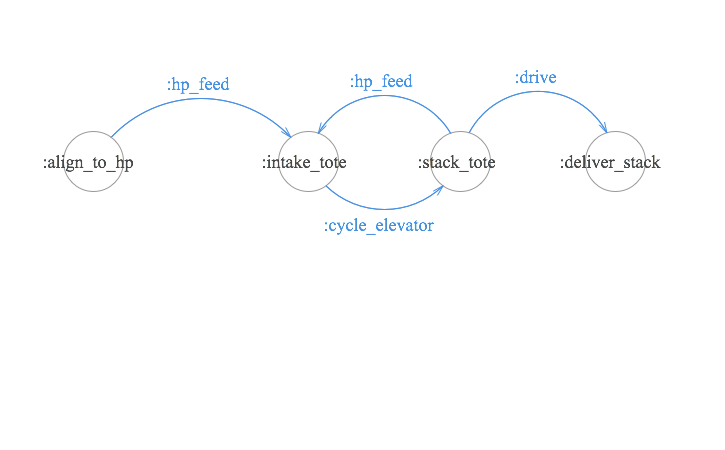
Last time I wrote out all the states and transitions, today I’m going to skip that and provide a simple diagram. You’ll notice it’s a fair bit more complicated than before. I’ve also eliminated a lot of states (such as collecting cans and driving to the HP station). The diagram started getting cramped so those events and states are left as exercises for the reader.

I was nice and color coded it for you; Blue denotes the good path through the system. Red denotes bad paths. Let’s get started coding…
The Good
We’re going to start with the good options. I’ve separated those out below.
Like last time, we’re going to write tests and then write the code to make the tests work. This is called Test Driven Development. Why write tests first? Because otherwise you’ll never write them. Why write tests? Because when these start getting more complicated you want to have simple tests to verify behavior.
# test/frc2015_fsm_test.exs
defmodule Frc2015FsmTest do
use ExUnit.Case
test "we start aligned to the human player" do
assert Robot.new.state == :align_to_hp
end
test "we should intake a tote after we hp_feed" do
bot = Robot.new |> Robot.hp_feed
assert bot.state == :intake_tote
end
test "after intaking a tote we should cycle the elevator to stack the tote" do
bot = Robot.new |> Robot.hp_feed |> Robot.cycle_elevator
assert bot.state = :stack_tote
end
test "after stacking a tote we should intake another tote" do
bot = Robot.new
|> Robot.hp_feed
|> Robot.stack_tote
|> Robot.hp_feed
assert bot.state = :intake_tote
end
# And now the things we can't do...
test "we can't cycle elevator until we've got a tote" do
assert_raise FunctionClauseError, fn ->
Robot.new |> Robot.cycle_elevator
end
end
test "we can't hp_feed once we are intaking a tote" do
assert_raise FunctionClauseError, fn ->
Robot.new
|> Robot.hp_feed
|> Robot.hp_feed
end
end
end
Ok, cool, we’ve gotten the good path mostly tested. The only thing I wanted to draw attention to before finishing off those tests is the fact that :stack_tote actually has two possible transitions and we aren’t testing them. Good news is, it’s pretty simple.
# test/frc2015_fsm_test.exs
test "we can drive to deliver a stack" do
bot = Robot.new
|> Robot.hp_feed
|> Robot.cycle_elevator
|> Robot.drive
assert bot.state == :deliver_stack
end
And the code to make it pass…
# lib/frc2015_fsm.ex
defstate stack_tote do
defevent hp_feed do
next_state :intake_tote
end
defevent drive do
next_state :deliver_stack
end
end
The Bad

Ok, I’ve gone ahead and implemented the appropriate tests for the bad, no reason to pad the word count of the article, if you’re interested see the github repository, it’s all pretty straightforward. I just wanted to show folks a good process for developing these once they get more complicated.
The Steps
If you only take away one piece of this article, this is it.
- Identify the states you can be in
- Identify the transitions between them
- Draw a picture
- Write tests for the states and transitions
- Write the supporting code
Next Steps
Hey, wouldn’t it be nice if the state machine could have some sense of, I don’t know, state? In our case, how do we know how many times to loop at the human player station? To do that we’re going to add some data to each state to track how many totes it has.
# lib/frc2015_fsm.ex
use Fsm, initial_state: :align_to_hp, initial_data: 0
And supporting test
# test/frc2015_fsm_test.exs
test "initially we have 0 totes" do
assert Robot.new.data == 0
end
test "cycling the elevator increments our totes" do
bot = Robot.new
|> Robot.hp_feed
|> Robot.cycle_elevator
assert bot.data == 1
end
Changing the cycle elevator method to update the data…
# lib/frc2015_fsm.ex
defevent cycle_elevator, data: totes do
if totes >= 6 do
raise "Stack Too High"
end
next_state :stack_tote, totes + 1
end
There’s also a couple tests added for when you stack too high in the source, check it out if you’re curious. If you’ve read this far you’re probably starting to see where we’re going with this. So far, we’ve built a reasonably functional state machine for a robot’s behavior. The next article is going to focus on actually figuring out how many points this robot could score in a match. And will give you a framework to build other options in. The important thing I want to make sure everyone knows, this analysis is not intended to be done after the season, it’s meant to be done the first few days of kickoff. While there seems to be a lot of code here, most of it was written in a couple of hours while writing this article (the article and the code are actually written simultaneously so I know I don’t miss anything). It’s absolutely doable the day after kickoff to have several models set up that you can tweak parameters on.
Bonus
Ok, common question – how do I know if I tested what needs to be tested. That’s called code coverage, I’ve added a library called excoveralls to this repo. You can run it with MIX_ENV=test mix coveralls (you’ll have to mix deps.get first) and it’ll tell you the code coverage. The higher this is, the better your tests are.
As always, the code is available over on github.
