Record: 23 – 8 – 1
Buckeye Regional Champions
Newton Division Champions
Einstein Semifinalists
Description of Robot Systems
One of the robots that I have had the pleasure of personally being apart of is the 2004 Greater Rochester Robotics robot nicknamed, “Roxanne.” There were a couple features about this robot that made it stand out from the competition.
Extension Arm
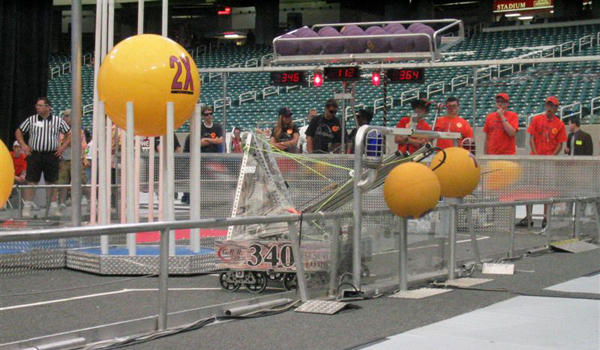
The first design of the robot was the retractable arm. The design was inspired from a the idea of an extension ladder. A window motor would run the timing belt through the side of the arm. This allowed the arm to extend outward. This design was chosen over the others because of the ability to be compact as well as giving the robot the ability to hook onto the bar from the floor. This ability meant that the robot could get around any defense played on steps or platform. Also, the arm was placed on a pivot to allow it to be used to move objects (See Image Below) and grasp the bar from different angles.
Also attached to the arm was a winch system. The winch system, seen with the neon yellow cable in the picture, was attached to the hook. As the arm extended out, the winch system would be pulled allowing the cable to unravel. Once the hook was on the bar, the arm would be retracted and the winch system would pull the robot into the air. The cable system allowed the robot to play defense on the platform and be raised/lowered at any point.
Tri – Wheel Drive System
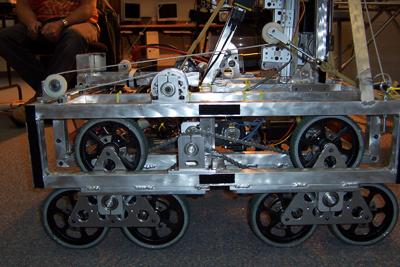
Besides the arm and lift design, the drive system was unique to the team that year. The design became more prevalent during and after the 2004 competition season because of these first implementations. The team determined early on that it would be important for the robot to climb the step in the field. This tri – wheel system gave the robot the ability to climb the steps of the playing field easily. The drive system was directly driven from the drill motors provided in the 2004 kit of parts. Each module of three wheels, gears, hubs, and other parts were assembled individually.
Surprisingly, the 8WD with treaded wheels had a good amount of traction without going overboard. Also, the robot frame was designed to accept 14 inch pneumatic tires in case the tri – wheel system were to ever fail. The team was impressed with the success and decided to leave the tri – wheel assemblies together throughout the competitions.
Robot Related Videos
Tri – Wheel Demonstration: The video above gives a good demonstration of the tri – wheel system. This shows how the tri – wheel system would have worked in the 2010 FRC competition: Breakaway.
Competition Video 1: This video shows how the arm allowed the robot get to the bar with the ability to play defnese on the platform. Pay particular attention to de-scoring move played at 1:30 with the extension arm.
Competition Video 2: This video shows how the robot was able to get up the steps easily with defense being played. It also shows the cable hanging system.
