Record: 41 – 23 – 1
Kettering District: Champions
Troy District: Semi-Finals
MSC: Semi-Finals
Worlds: Quarterfinals
Description of Robot Systems
This robot, nicknamed Buzz XVII, is fairly unique looking and has several features that boosted its competitive stature amongst the competition.
– “Joe Johnson” Collector
– Bridge Manipulator
– Barrier Ski Jump
Coined after the original creator the “Joe Johnson” features belts moving parallel to the front of the machine and perpendicularly inwards. This setup allows the balls to serialize themselves before entering the machine which eliminates nearly all of the potential for ball jams. Because it is also the full width of the robot (in the wide orientation) it maximizes ball pick-up area and makes it very easy to take balls off the bridge. The wooden “fangs” are lined with metal strips and epoxy bonded to form a light, strong, and easily replaceable surface to take abuse as the leading edge of the machine. This is what is manipulating the bridge and initially hitting the barrier as the robot goes over. In order to provide the force needed for the arm to push down the bridge and/or stay down while going over the barrier the arm has an over center cam which pushes with increased force as it goes down until it locks and becomes one with the machine. As a bonus the arm can reach far under bridges to get balls or can be used to tilt a bridge the other way to allow a struggling opponent to get on to co-op bridge.

Drivetrain

The drivetrain is an asymmetrical 6wd with an extra pair of raised wheels for constant contact while traversing the barrier. Each wheel is specifically selected based on its function in the drivetrain. This combined with excellent geometry allows the robot to minimize tilt over the barrier to 14 degrees despite being short, gives us a 16” wheel base to turn on (sufficiently short for a wide robot), and provides the traction and a far back wheel-to-ground contact point needed on inclines as the back wheel engages. Because of this when triple balancing we can push 2 other robots up the bridge without effort on their part and hang the back 10” off while remaining rock solid. The shifters are geared for 12.5 and 5fps which provided an actual ground speed of 10 and 4.5fps. We found this ratio balanced our need for speed with acceleration to get around the field as quickly as possible.
Tower and Gun (Turret)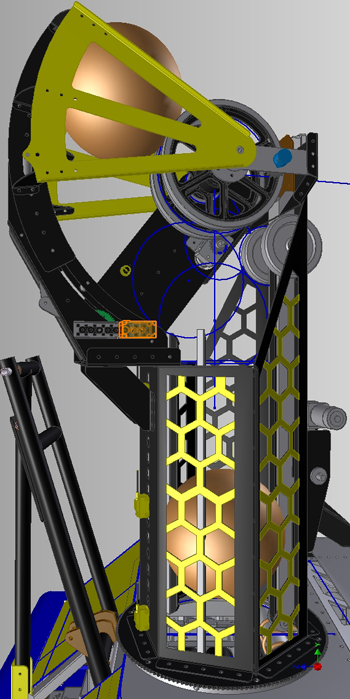
The entire upper half of the robot consisting of the gun and tower rotate about the bottom on a Lazy Susan bearing which allows for 360 degrees of rotation. This is very helpful in auto mode as the robot can score, take the 2 balls off the co-op bridge, line back up, and shoot without ever turning. A single gates belt lifts the balls up and into the kicker wheels which travel 8x the lift speed eliminating dead spots and quickly propelling the ball into the gun. Meanwhile five sensors serialize the balls in the tower so they are always ready to shoot. The shot trajectory is controlled by both an adjustable hood on a simple linkage and the flywheel speed. By controlling those and the azimuth angle the robot is capable of making shots from a variety of positions and orientations from the back of the key to up against the fender.
Stinger
The stinger is very simple but effective using a block and tackle winch system in conjunction with a small anti-backdriving drill transmission and 550 motor. While the entire assembly including the motor and bracketry weighs only 3 lbs it has been responsible for more successful balancing attempts then almost anything else over the course of the Rebound Rumble season not missing a single co-op over the course of the MSC or Worlds where the stinger was deployed. This is because the four bar reaches outside of the machine allowing the front of the robot to be equal with the middle of the bridge during double balances (so our partners don’t have to move throughout the entire process once they get onto the bridge). In triple balances the further rear ground contact point helped stabilize the robot in situations when a straight downward deploying devise would not have sufficed.
– Bryan Culver
Robot Related Videos
2012 Kettering District Finals Match 1
2012 Kettering District Finals Match 2
