
How did you decide what portions of the game challenge to address?
FRC558’s design process is similar to many teams. We spent a large amount of time reading the rule book focusing on the game section, specifically alliance interaction and the ranking system. Each year it is really important to get a good understand of these two things in order to predict how the game may be played. Our process involves first breaking the game down into tasks and what each task is worth, in Ariel Assist there are various tasks, including but not limited to: receiving the ball from the human player, scoring in the high goal, scoring in the low goal, passing to a partner, picking the ball up from the floor. We then look at the “What”s (what tasks will give us the greatest reward for the lowest risk or amount of work) and we prioritize from there. For the 2014 game our priority list was:
- Have a strong/maneuverable drivetrain
- Pick up the ball fast
- Receive the ball from the human player
- Maintain control of the ball
- Pass the ball
- Shoot over the truss
- Score in upper goal in Autonomous
- Score in upper goal in Tele-op
From this you can see that our primary goal was to maximize passing and being the best alliance partner possible. We sought out to control the middle of the field, and rack up assist points while laying down brutal defense. We believe we achieved this goal and adapted the “Truss and Destroy” Motto.

What process did you follow to evaluate different approaches to challenges?
The team is broken up in small groups to focus on prototypes for the “How”s, in other words the specific mechanisms to do each of our goals. The drivetrain was pretty well set as we decided to develop from our baseline from the previous year. Our main choices were how to get the ball into the robot and how to get it out of the robot. For these we spent a large amount of time prototyping (one benefit of using mostly COTS items is that we can afford to spend the extra time during this phase of design).
What other options did you evaluate?
For the shooter we prototyped a number of different options include a linear punch, a spring powered catapult, a linear catapult, a pneumatic catapult, and a slingshot. For the intake we tested three options, a claw like device, the “toros”, and a single horizontal roller.
How did you decide on the approaches you chose?
We based our final decisions on the results of our prototyping, but also on the information gathered from previous years robots design (our own and the community). Based on our goals we determined that a horizontal roller and a spring powered catapult would function and package nicely on our chassis and be within our limitations fabrication wise. Eventually after our first event, the catapult was re-designed to be fully pneumatic to reduce complexity and increase consistency.
How did you go about creating your solutions?
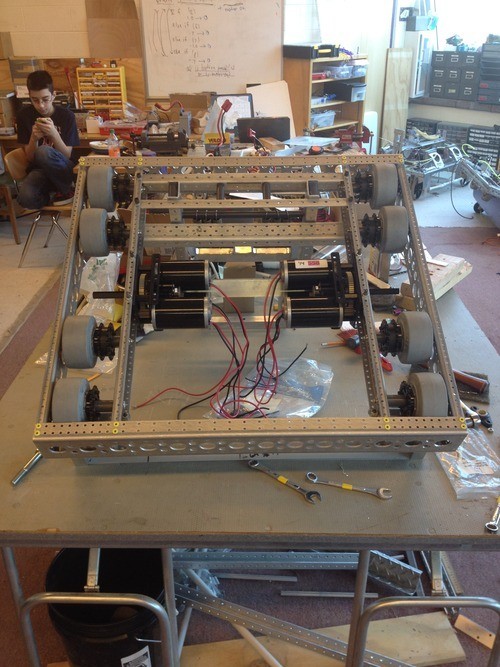
- Drivetrain: Every year the team discusses the three most important parts of the robot, the drivetrain, the drivetrain, and the drivetrain. After success in the 2013 chassis with the 2013 VEXpro Drive in a Day Chassis and the Single Speed, Single Reduction Gearboxes the team turned again to new 2014 VEXpro Drive in a Day Chassis and the same gearboxes. This was verified in a quick CAD mockup (a first for the team). The VEXpro chassis is designed to run a 6wd, however the Robo Squad modified it by adding a few holes to make in an asymmetric 8wd. The gearbox that was selected was the 12:64 ratio, with an additional chain reduction to the wheels of 15:22. Building again on the baseline drivetrain from the previous season the team turned again to West Coast Products Dead Axle Colson Hubs to put the power of the 6 CIM drivetrain to the floor. In 2013 the team ran 5”x1.5” wheels to safely navigate over Frisbees. With a flat open floor and lots of expected defense to be played the team choose to run 4”x2” Colsons in 2014. The resulting drivetrain, assembled with 3/8” grade 8 bolts for axles, and #35 chain, required no work through nearly 100 matches and was able to deal out some of the strongest defense that New England has to offer.
- Shooter: The shooter is another case of COTS parts and simplicity. The Robo Squad, known in New England for their use of pneumatics opted to build a completely pneumatic shooter. The system uses two 1.5” Bore, 10” stroke cylinders each fed by their own solenoid (McMaster 6425K11) and individual air storage tank (at 60psi). The rules allowing for alternate solenoids in 2014 was the key to this system. The shooter also had weather stripping added to it during the season, this compliance in the shooters rails limited the variation in shots due to ball irregularities.

- Intake: Arguably one of the robots best features is its intake. Heavily based on the 2008 robot FRC16, the motor inside roller, polycarbonate arm took heavy abuse all season and never failed to get the ball off the floor quickly. Shown above is the mock up of the assembly with the initial gearbox and motor selection powering each side of the roller (BAG and 15:1 VersaPlanetary). This setup was eventually swapped out in favor of the BaneBots 775 motor and 10:1 VersaPlanetary. The initial grip material selected for the roller was rings of polycord, to increase friction the team switched to Gum Rubber tubing (McMaster 5546K41).

What issues did you run into in design, fabrication, or use? How did you overcome them?
FRC558 is a “low resources” team, we build our robot in a small shop that largely consists of standard hand tools along with a drill press and a small band saw. Because of this we focus on building with things that we can buy and modify rather than a lot of custom manufacturing.
What would you do differently if you could redo it again?
At the end of the season, there are only a few things that the team would have like to have done differently or improve on. We found that a major weakness of our design was that the intake had to be completely open in order to shoot, this allowed teams to disrupt our truss shooting during tele-operated largely because of the increased footprint with the intake open. A design that allowed us to shoot while keeping everything inside of our frame would have been a significant improvement. While we were impressed with the amount of abuse the VexPro chassis could handle, if we could start over we would add additional bracing and standoffs to the chassis to make it more rigid.
Any final thoughts on the overall solution?
The team is very proud of the use of COTS on this year’s robot and how we were able to iterate throughout the season because of it, including changing the ratio and motors on the intake and a complete shooter redesign after our first district.

Quick Facts Section:
- Drivetrain: 8WD
- Linear Speed: ~9.5 ft/s
- Wheel Type: 4×2 Colson
- Speed Controllers: Victor 888
- Programming Language: LabVIEW
- Official Record: 58-27-0
Article Content Provided by: Justin Foss (FRC558 Mentor)

[…] an AIR Strike – FRC78 (2014) [PP] Coach’s Corner with Adam Freeman [SA] Dozer Does It [RP] COTS making Shots – FRC558 (2014) [PP] Insider Info on Game Announcing [RP] Windham’s Wingman – FRC3467 (2014) [EA] […]