Each week we will be posting an extended version of the Spectrum Build Blog to the Blue Alliance Blog. Build blogs give an inside look at the progress and process of FRC teams.
For nightly updates head over to the Spectrum’s build blog. Blog.Spectrum3847.org and for more updates follow Spectrum on Twitter, Instagram, or Facebook.

We’re now 4 days through the season. This is when teams are finalizing their initial designs and beginning to build more high-quality prototypes.
Strategy Breakdown
One of the main goals for the first few days of the season is to make sure everyone on the team has a very firm grasp on the important aspects of the game strategy.
First Impressions
- Additional Human Players on the field.
- Lots of balls on the field.
- Flat field, nothing to drive over, very low bumpers, and ground clearance
- Auto has big potential bonuses
- Have to understand the ranking system (additional ranking points for tasks)
Ways to Score
- High goal
- Low goal
- Auto moving
- Reserve gear (rotor 1)
- Reserve gear has to be applied to a different rotor if rotor 1 is engaged during auto
- Points on the ground (Fuel on the ground)
- Gears to run the rotors
- Climbing points
- Penalty points
Ways to Deny Points
- Controlling game pieces
- Hoarding balls
- Hoarding gears (not really likely)
- Remove Gears from opponents lift (before they are raised into the airship)
- One on One Defense (pushing, hitting, etc)
- Especially while shooting or placing a gear on the lift
Limited Resources
-Game Limited Resources:
- Time (2:30)
- Gears
- Only located in Return loading lane
- 18 per alliance
- Full Hoppers – 5
- Space In front of hoppers (likely only 2 robots in front of each hopper)
- Space in Front of the Boiler
- Only a couple teams can fit directly in front of the boiler at a time and only one centered
- Two Return Loading Stations (In Loading Lane)
- Not symmetrical
- Gear Lifts
- Each alliance has 3
- Only two are on the side with the boiler
- Only 2 pilots to pick up gears
- Visibility may be hard from some stations to some lifts
- Space on the airship for gears
- Max 12 gears scored per alliance
- Visibility
- Sight lines will be obscured by the Air Ships
-Robot Limited Resources
- Very tight volumes
- Weight = 120lbs + bumpers + battery
- Battery Power (only one battery)
- This limits the number of motors to use at one time before brownout
- Air storage and production capacity
- Only one gear can be controlled at any time by your robot
Points in FRC STEAMworks
We worked out a points analysis for the game. This led to several conclusions. The GEARS have a diminishing return, the first 2 GEARS you score (not counting the reserve) are worth a combined 40 points. Then the next 4 are combined to be worth 40 points, then the next 6 combined are worth 40 points. This means your robot has to do the same amount of work for fewer and fewer points. They are scored in groups so if you score GEARS 7-11 but not the 12th all that work won’t be represented in the final score.
The FUEL points are interesting since it takes a certain amount of scored goals (3 for high, 9 for low in Telop) to actually score a point. This should be far less time consuming then an unscored gear. FUEL (balls) are always worth the same amount of points and there are a ton of them in this game, 600 possible balls on the field.
What does this mean for STEAMworks matches? Most likely teams will focus on getting GEARS first since they are worth the most points for the least work for the first few GEARS. After each Rotor starts spinning the alliance should consider if they are going to be able to reach the next threshold to earn points. An alliance with 3 rotors spinning (6 GEARS scored) and only 45 seconds left in the match probably shouldn’t continue giving GEARS to the airship since they have little chance of scoring 12 GEARS for the next Rotor.
FUEL is always valuable unless you overload the BOILER or score too many FUEL too close to the end of the match.
ROPE CLIMB is the highest valued single item and probably the best points/sec in the game.
Our Keys to STEAMworks
- Every robot should be able to score gears
- The first two GEARS are worth 40 points. If you find yourself on an alliance with no one who can score GEARS it’s going to be hard to win a match
- Climb on
- The mechanical challenge of climbing a rope seems daunting but initial trials by “Robot in 3 Days” groups and others shows that there are many relatively simple ways to accomplish this. Anything that can be done on an FRC field by spinning a shaft is normally doable by a lot of teams.
- The intake is king
- With this many balls on the floor, you have to a have an amazing intake if you want to be an awesome robot. Hoppers only let go a max of 5 times a match and the human player is a long way from your BOILER.
- Balls per second
- You may have the most accurate shooter in all of FRC but if your rate of first isn’t high enough it’s not going to matter. Shoot a lot of balls and shoot them quickly. Shooting percentage will matter but possibly can be overcome with quantity.
- It’s a cycle game disguised as a mass collect game.
- In other mass collect games, your goal is to gather scoring objects for one to 3 big bursts of scoring. This was how 2006 Aim High and 2009 Lunacy were both played. STEAMworks isn’t a mass collect game it’s a cycle game. The top teams will be scoring GEARS and FUEL each cycle. So that means we have to optimize our cycles like 2013 “Ultimate Ascent”
Time Analysis
How long does each of our cycles actually take?
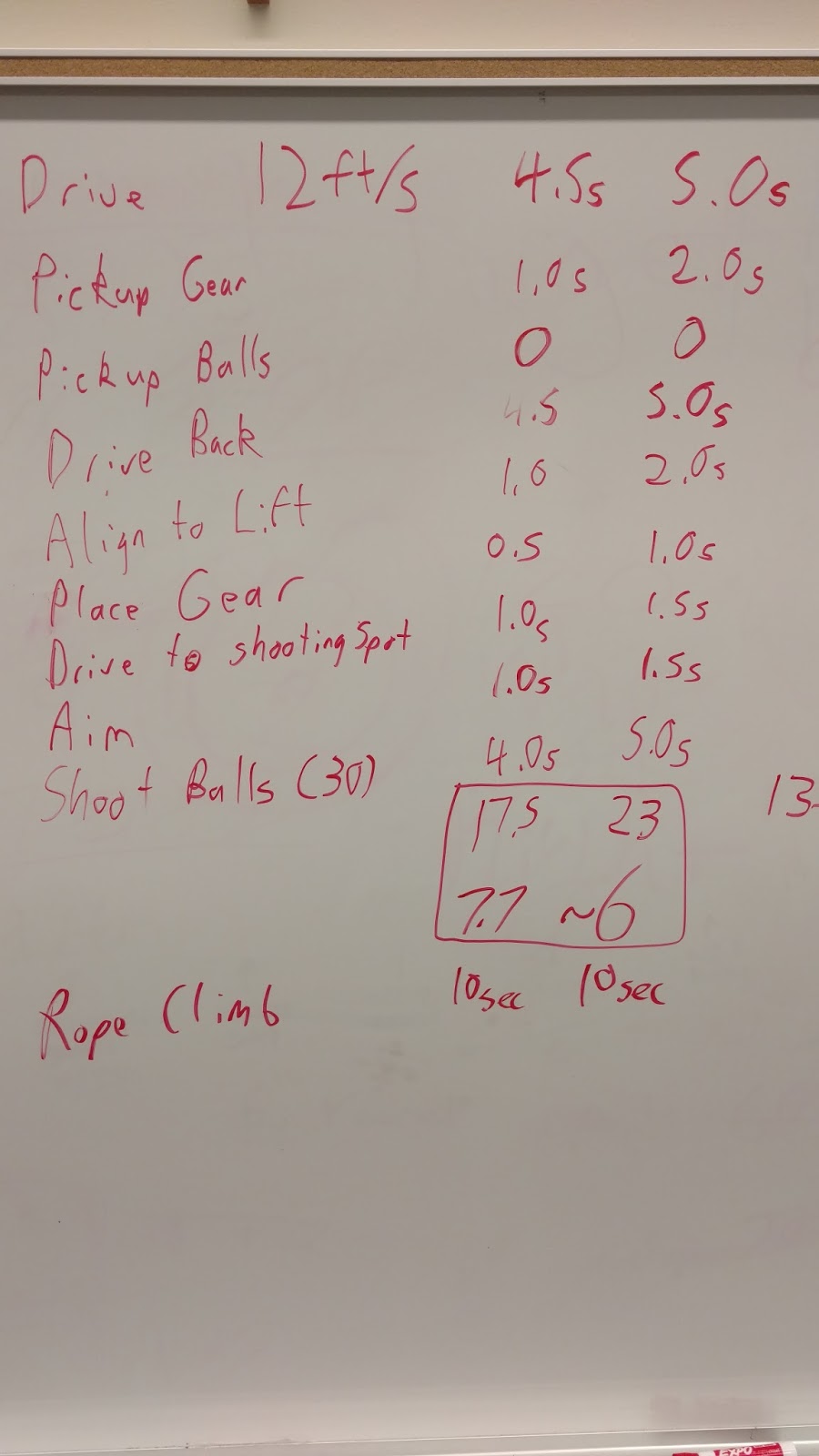
Our quick estimate says that we should be able to get 6-7 cycles of 1 gear and 30+ balls in the teleop period of the match. These are optimistic — defense, driver mistakes, waiting for alliances to clear needed space, etc. will slow these times down. This assumes we are using a floor loading GEAR pickup so we don’t have to align to the loading station.
Initial Robot Plan
After strategy comes robot design. What robot do we build that can accomplish our strategy.
Robot Requirements
- Fast maneuverable drive base
- Wide Collector that can intake all the balls we run into while driving across the field.
- Modest ball storage – 40-50 balls is likely more than enough for a cycling robot. We want to be able to catch from the hopper but catching every ball isn’t needed.
- Floor GEAR intake – on the same side as the ball intake.
- Rope Climbing Mechanism – This should be quick but world class is likely not needed 5-10 secs is more than fast enough.
- Shooter
- We are still developing
- We need a high goal shooter
- We want a high rate of fire
- We wish to have multiple shooting angles and positions
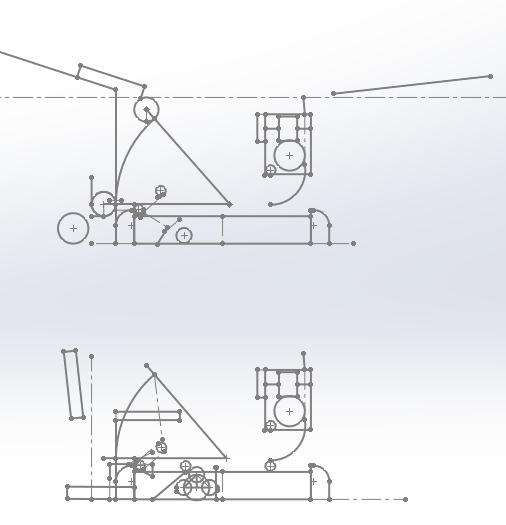
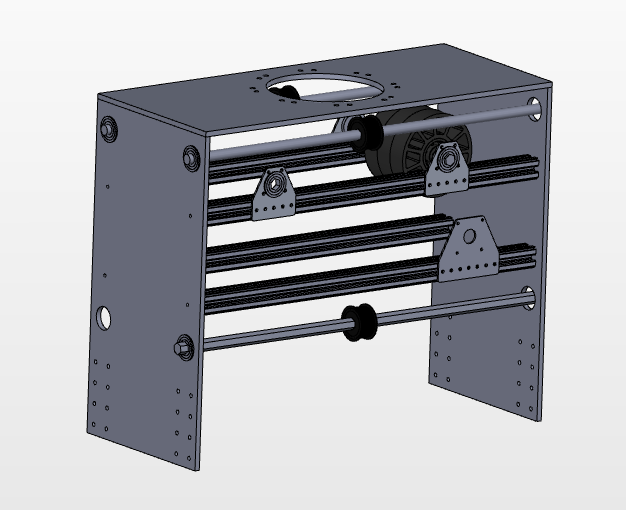
Current Design
Most of our current design is laid out in various ever-changing and often confusing Solidworks sketches.
We know
- 29″ x 29″ Robot Chassis.
- 35″ x 35″ after we have bumpers
- This allows us to extend 4+ inches out past our bumpers in any direction we choose as long as we don’t do it at the same time during a match.
- Wide and short lets us collect from the hopper and human loader if we need.
- Fold Down mecanum wheel intake over the front bumper
- Allows us to have a 28″ wide intake
- Mecanum wheels spin the balls in past the bumpers
- Cut in our front bumper for balls to pass through. ~17″ wide
- Rear mounted elevator and shooter
- Allows for a reasonable angle shot with your front bumpers pressed into the BOILER
- Climbing drum likely mounted low and on the back of the robot.
- Long drum to allow for less accurate driver alignment
Prototyping
- Turreted shooter
- We are looking to learn
- How the balls react to flywheels and spin.
- How they react to hitting a hood?
- How consistent are various flywheels?
- Here is our first prototype design for the shooter.
- We are looking to learn
- Gear Intake System
- The plan is to fold down an active roller and a small plate to intake the gear similar to how many 2011 intakes worked.
- We will need to package this into a small space for it to work with our design.
Open CAD Models
This year we are making all of our CAD completely available every Tuesday night (probably Wednesday morning). We will be updating our Grabcad Public Partner Spaces with the previous weeks CAD files. Feel free to use them however you wish. We make no guarantees about completeness or how much help they may be but we think it may interest some teams. If you don’t see any updates contact us and we will update, we may have just forgot to push to the partner space.
You can find links on the 2017 Gamma Ray page of our website.
http://spectrum3847.org/robots/2017-gamma/
Check out check_in
We are part of a brand new program from the RoboSportsNetwork called check_in. Along with 5 other teams from around the country, we will be sharing our build progress from the week and showing off our designs. Tune in every Tuesday at 7 ET (6 CT) for check_in. The first episode aired last night can be seen on the RoboSportsNetwork Youtube Page.
Twitch: https://www.twitch.tv/frcgamesense
YouTube: https://www.youtube.com/user/FRCGameSense
– Spectrum
“What lies before us and what lies behind us are small matters compared to what lies within us. And when we bring what is within out into the world, miracles happen” — R.W. Emerson
