Phew, that was a long week!
So…. Where were we? Oh right, well….
Testing
A lot of testing was done this week. Most of the prototypes were finished by the end of last week and were tweaked after each test this week to try and get the best performance out of each one.
The shooter got a much-needed improvement in several regards. The pneumatic wheels that we used on the original design are too bulky and large as we don’t have much space on the robot this year. That is the reason we are now testing with 4-inch Colsons on the shooter. This seemed to have a much better result.
PID was a big task on the programmers’ list of things to do which was partially finished as it seemed to give us a consistent shot. Now to tune this to get a faster rate of fire and the same consistent shot.
We also added a hood in order to be able to change the height vs distance of the shot as we can get it high enough with about 50% power so wanted to see how far we can shoot from. Using untuned PID we were able to get about 1bps and a consistent shot from that spot. This will let us shoot from the hopper in auton, which will help us get to 40kPa quickly. This is the non-PID version:
https://goo.gl/photos/2gFpm4mQXQ9kcxTcA
There has been a lot of spring questions for the lift. We got ours from Essentra and it seems to be stiff. A lot more stiff than some of the videos out there. The McMaster one looks extremely close if not the same as the one we have (so that’s good).
https://goo.gl/photos/TxAn3dJVLYmEFzwy8
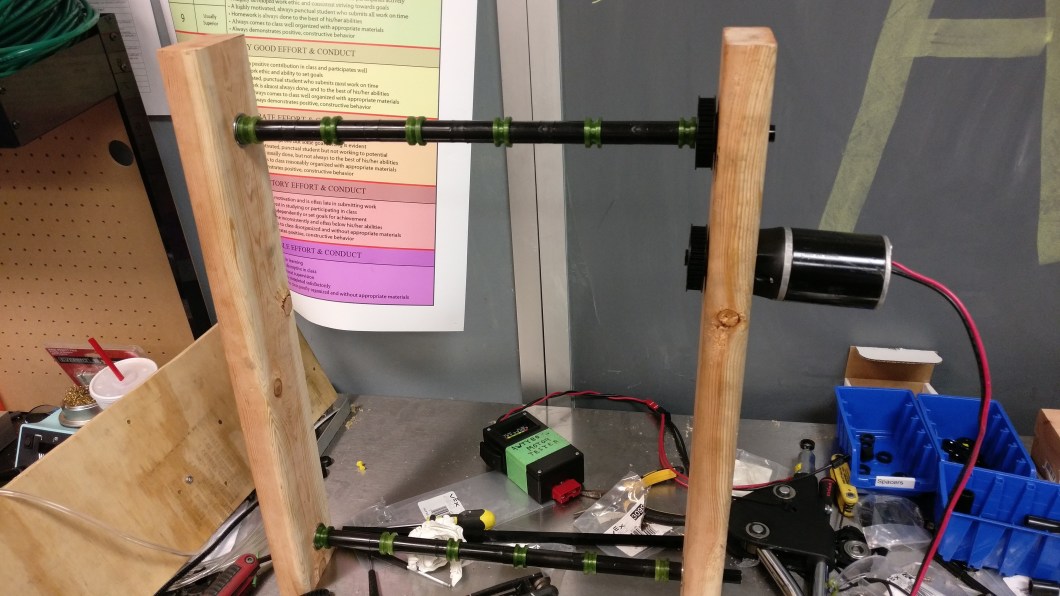
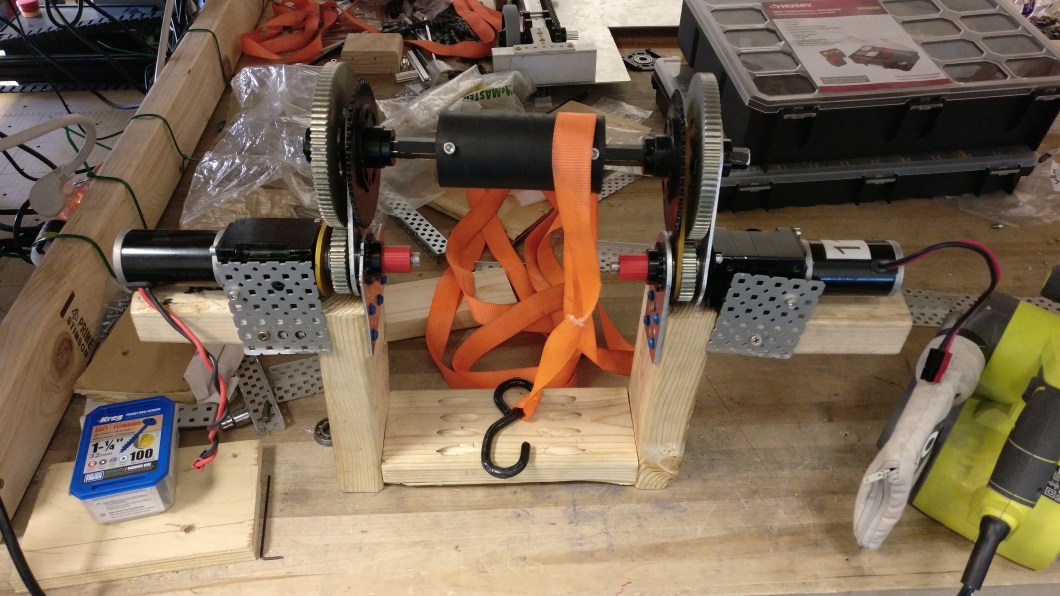
The latest hanging mechanism was tested. From last time we added a second bag motor and gearbox on the other side, reduced the overall gearing to 63 to 1 (3 on the outside and 3 and 7 on the inside). This gave us a climb of 4 ft in 4 seconds theoretically using the JVN Calculator (https://www.chiefdelphi.com/media/papers/3188?langid=2) When we tested this it seemed to be about right and was able to hold the weight with a half inch ratcheting wrench holding the system from falling down.
https://goo.gl/photos/bXDNmDX8WZ59Jrep7
The intake was not tested much since last week but, we are currently in the process of making a cleaner version that we can put on the V1 chassis to drive around and collect balls. This is now out of 2x4s instead of the bent plywood and is powered by a Minicim 1:1 using the WCP pulleys.
The passive gear manipulator changed a little bit in order to be able to fit onto the intake shaft and let the balls pass under it (it’s not completely together yet). This lead to some manual (people being robots testing of the passive gear slot. Here is what we came up with:
https://goo.gl/photos/ABMaN3R8MAqzFZdJ6
Overall Progress
Overall we are on track (a little behind on getting the V1 drivetrain wired and driving but we will catch up Monday).
The drivetrain
V1 was built into correct dimensions (remember bumpers are in the final dimensions this year). It has wheels and is chained now, and ready for the electronics to be put on.
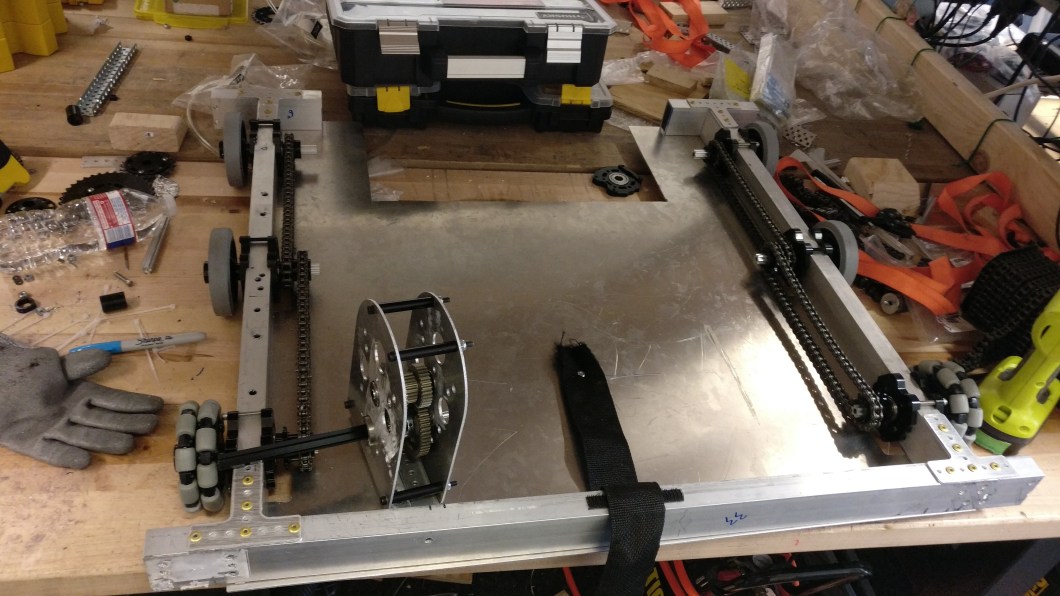
One gearbox is somewhat put together so Monday we have to put together the other one as well as finish this one so we can start driving this around.
The Electronics team
Left the prototype drive as a base for testing the shooter for now so they created new electronics system to connect the drive motors to be able to drive around this new chassis. There is very little room this year in the robot so electronics is trying to figure out how to most efficiently pack everything under the hopper.
The Other subteams are working on V1 of their respective systems.
The Shooter
Getting a metal version made right now. Instead of having a large chain going from the motor to the wheels it will be a short pulley and belt which will help with noise as well as hopefully be easier on the motor.

The Hanging system
Upgraded to include the rubber roller of 2-inch diameter so that we can get a faster lift (vs a 1/2 inch hex shaft) and it is grippier on the rope. This system is in need of a metal prototype but we need to add it to the CAD and then see what actually needs to be made.
The Hopper
Opening mechanism was constructed so that once we get the robot with the hopper we can see how many balls we can get and how we are going to hit this mechanism. We specifically didn’t make it as in the team drawings as we wanted to simulate the one that was going to be on the actual field. This led to us using 1×1 as we didn’t have any 3/4 round tube which seemed to work just fine. Speaking of holding balls.

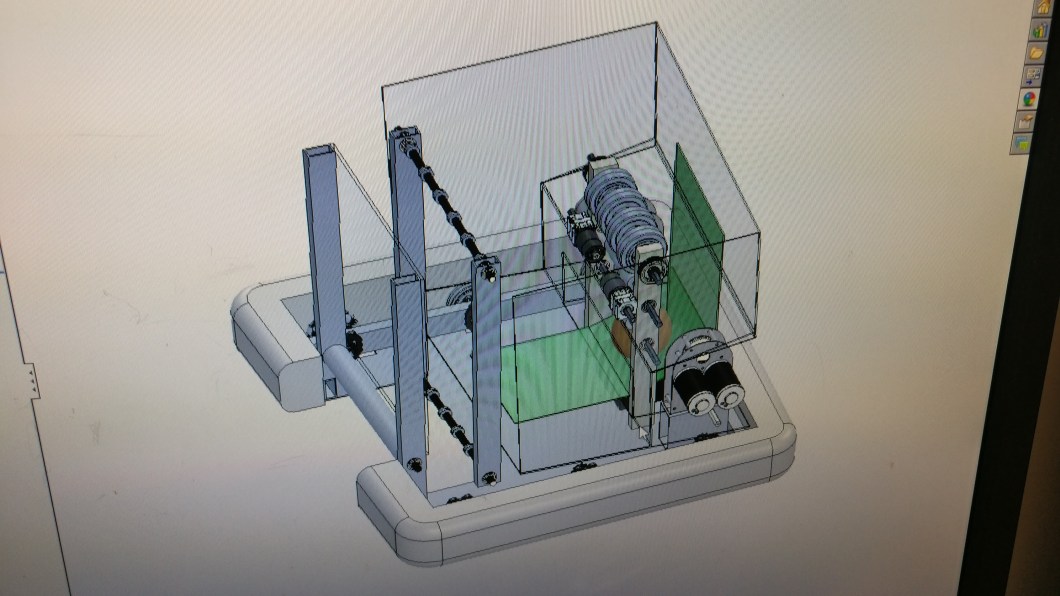
The robot CAD team
A lot of work done to see how many balls our robot can hold by getting most of the subsystems started and some close to finished. The shooter actually looks like a shooter now (it is still a little short but that’s not hard to change) and the intake is almost done. This lets us see the number of balls that fit in the hopper. Theoretically just using volumes and assuming that the sphere is a 5inch cube, we can hold 75, but after some packing factors and the balls not fitting in some areas we should be able to hold around 50.
Overall very productive week! A lot done, but still a lot left to do. Onward and upwards… Or however that saying goes.
