After a long and productive season we have done it!
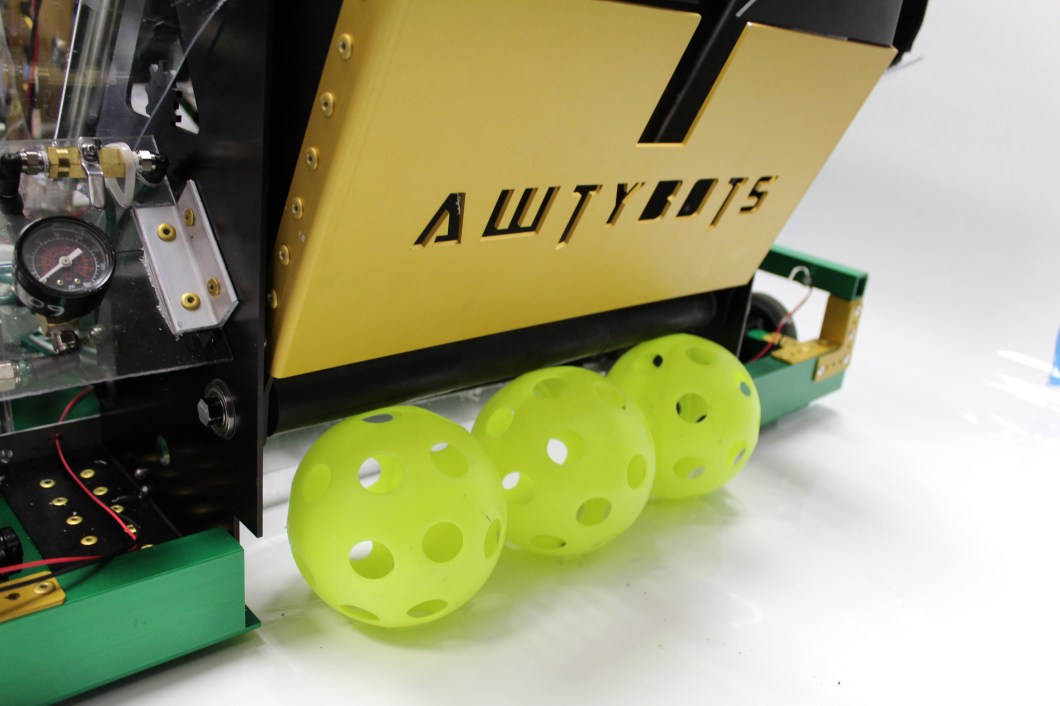
I would like to present to you BumbleBee!
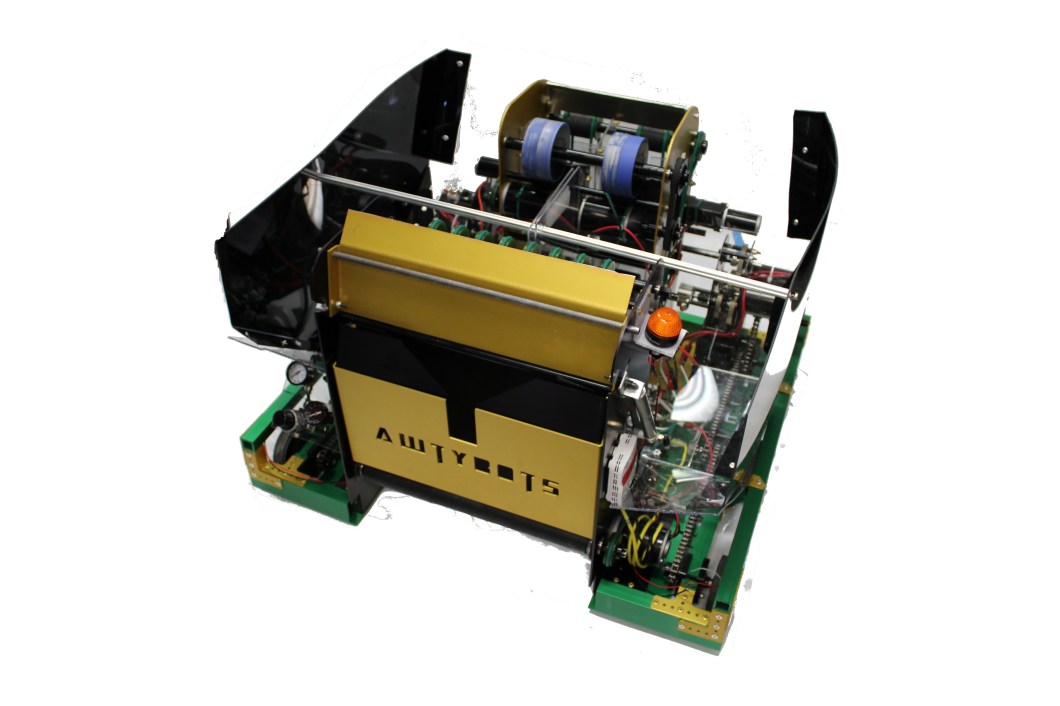
Here are the details:
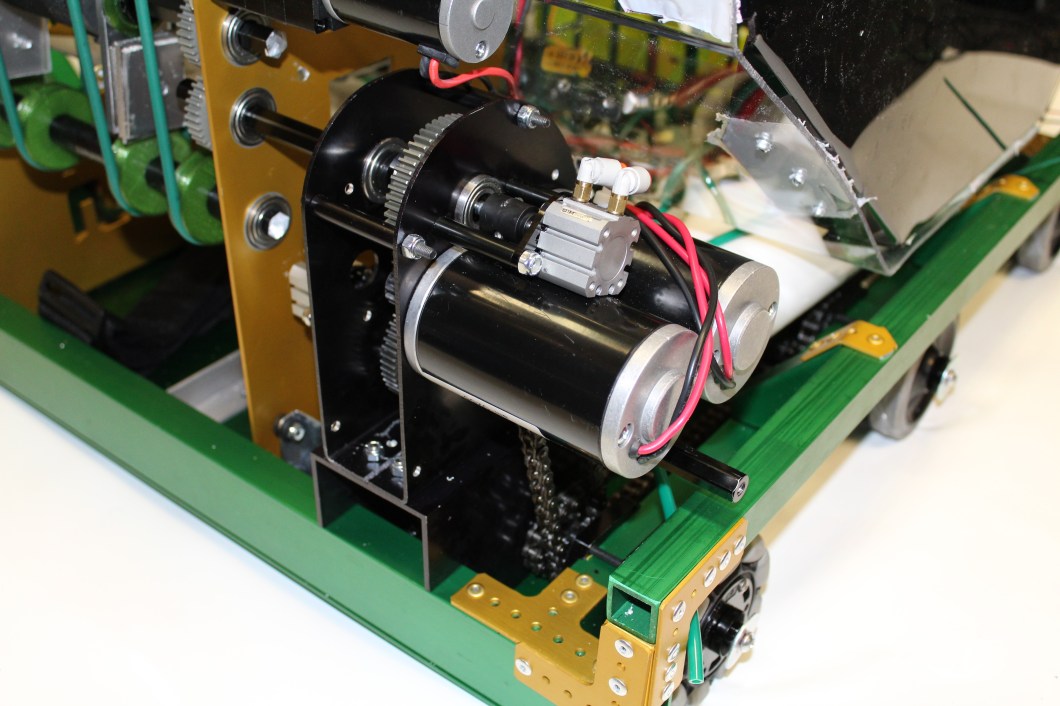
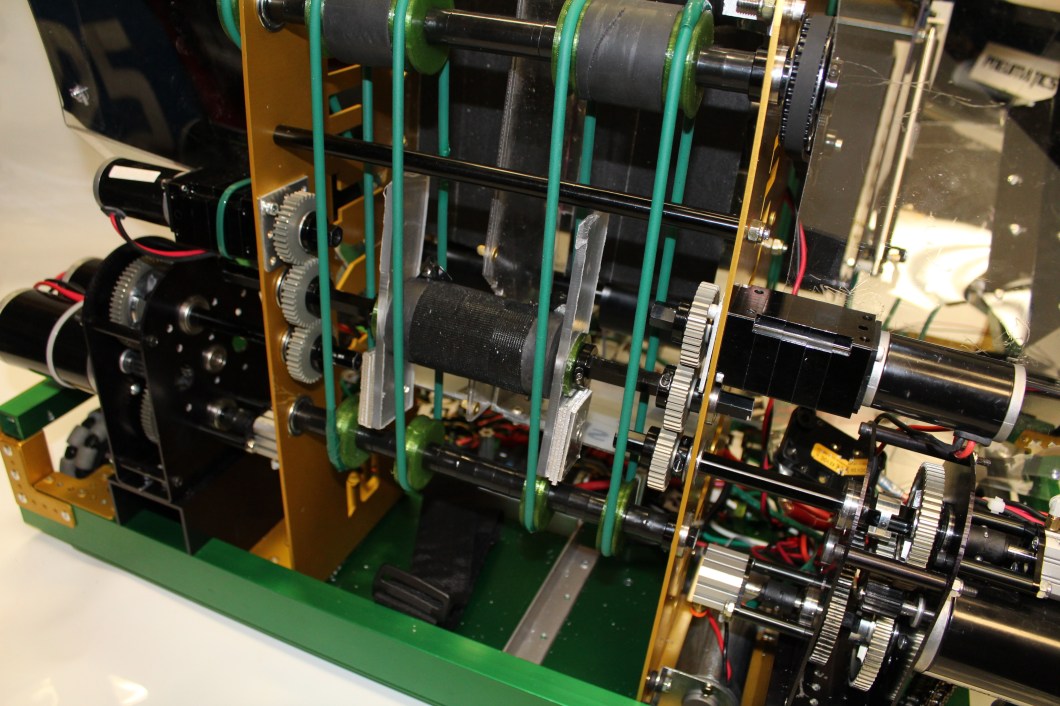
Drivetrain
- Custom AwtyBox V2 gearbox using WCP dog gear setup
- 2 CIM per side allows for 7 ft/s low gear and 15 ft/s high gear
- Shifting to a 54-tooth custom milled dog gear for the hanger
- Six wheel drive (two omni, four traction)
- Omni wheels on back to give greater control for the gear placement.
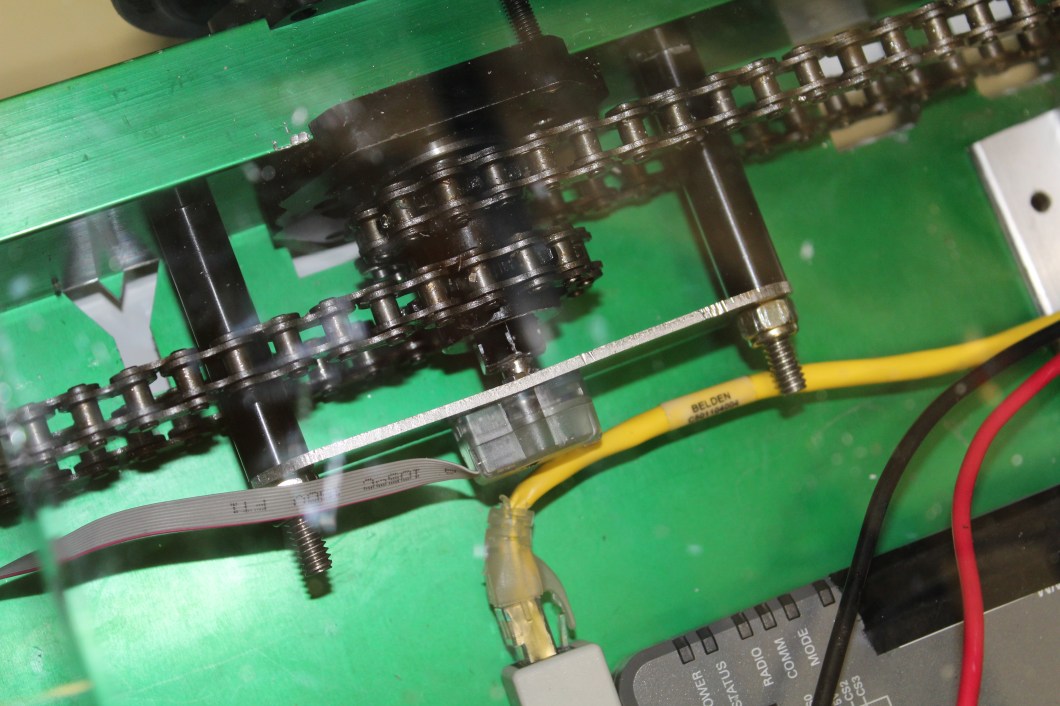
- SRX encoder mounted on middle wheels for autonomous
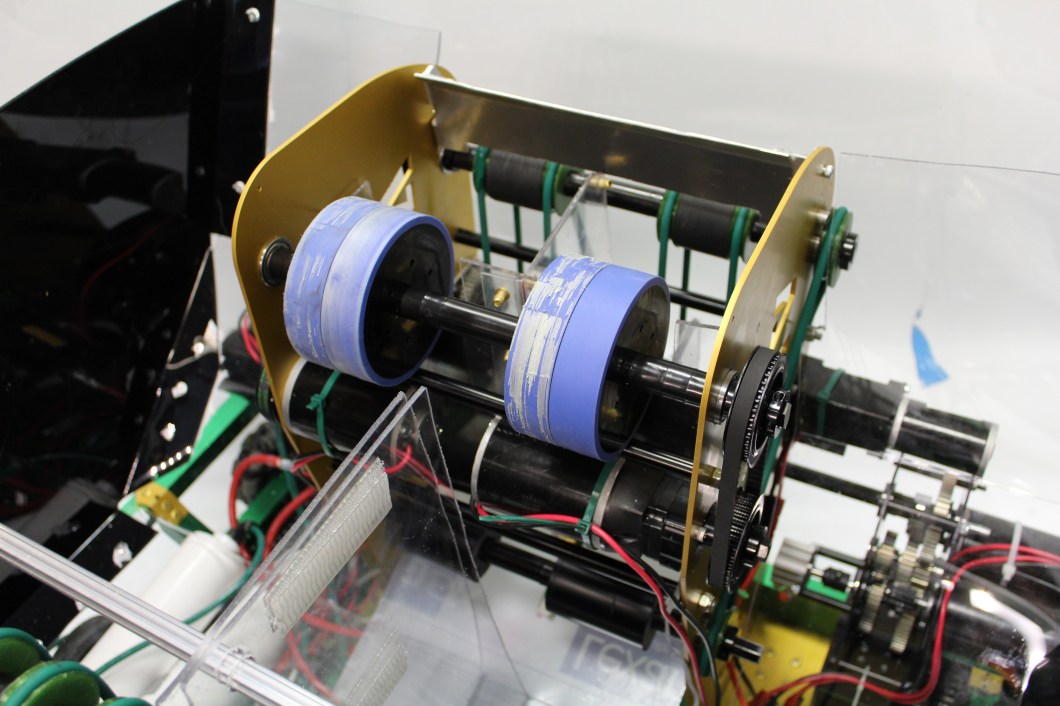
Shooter mechanism
- 4 Andymark stealth wheels
- Ability to swap out to two 1.5 inch Colson wheels
- Powered by one MiniCIM
- WCP Pulleys 1:1 from MiniCIM to shooter wheels
- VEX Integrated encoder for shooter PID
- Hard stop for close up shot
- Pneumatics to bring hood forward (not in picture) for the far shot from the hopper
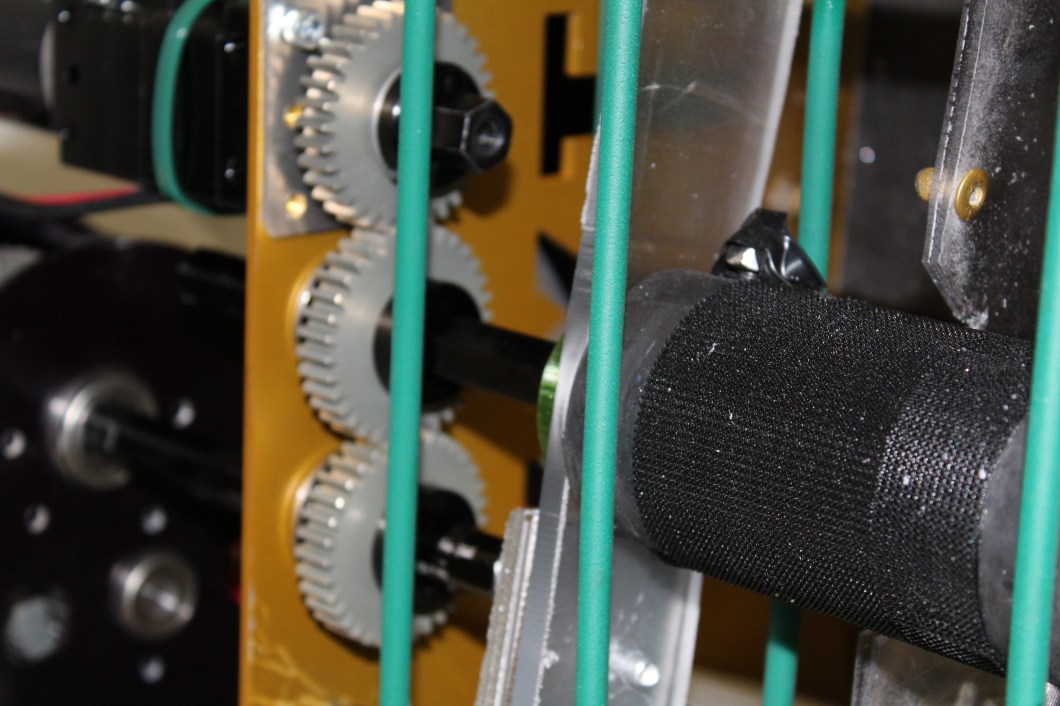
Shooter intake mechanism
- McMaster polycord on custom 3D printed pulleys
- Powered by one MiniCIM 1:1
- Front rollers out of McMaster Neoprene Rubber tube
- Divided into two for the ability to shoot two balls at once
Intake
- Three ball wide intake
- Powered by one MiniCIM 1:1
- Chained to the back shaft that drives the front and top pulleys via polycord
- Front roller out of McMaster Neoprene Rubber tube
- McMaster polycord and custom 3D printed pulleys
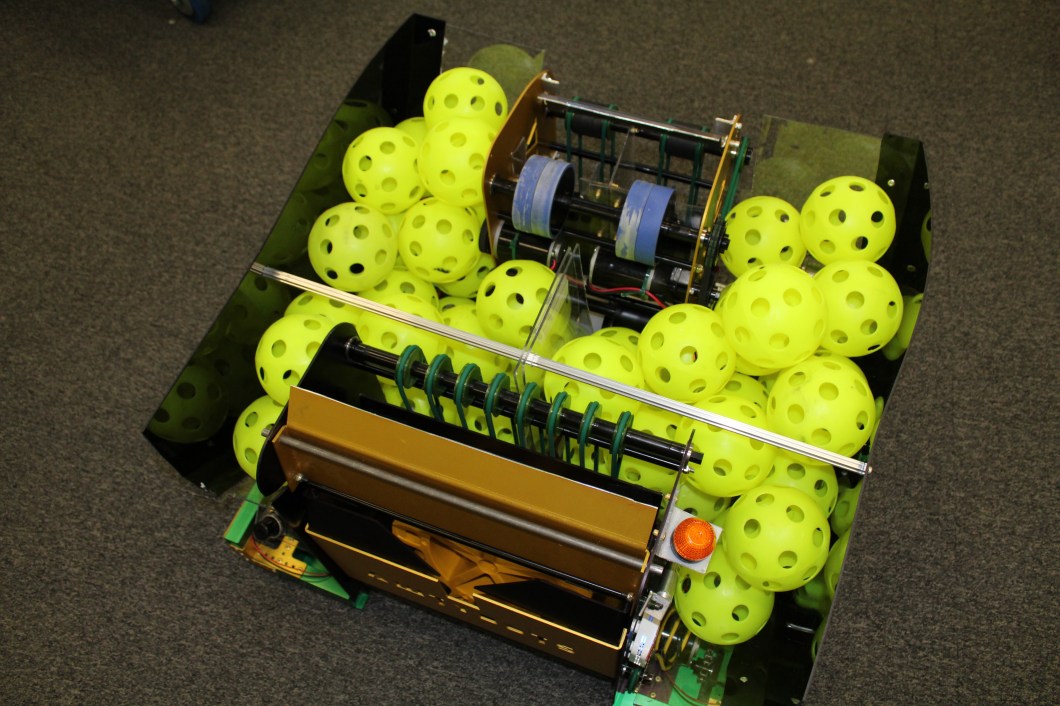
Hopper
- Ability to hold 50 balls
- Self feeding into the shooter via gravity
- Attaches in the middle with velcro to be removable for electronics access
- Slides sideways on both sides
- Clear bottom to diagnose electronics issues
- Black sides for sponsor logos
Hanger
- Two inch roller with velcro
- Powered by either two bag motors 63:1 or the drivetrain motors
- 2 lexan plates for touching the pad before the davit weighed down with aluminum to always be perpendicular to the ground
- Manual control with option to add a button to auto stop at the touch of the pad
Passive Gear Intake
- Passive intake activated (pulled out of frame perimeter) by intaking one ball
- Acts as the back of the intake
- Centers the gear and gets it to the right height for the lift
- Flap powered by pneumatics prevents balls from falling into intake when loading gear/balls from loading station.

Reveal video located here:
