Building on the success of the teams 2016 season, the Elm City Robo Squad looked to build a robot that could play all facets of the game. The priorities at the end of the game analysis session read as follows:
- Drivetrain
- Hang
- Floor/Score Gears
- Shoot Fuel High (Against the Boiler)
- Fuel Intake.
The team spent the build season developing a double wide drum shooter, a fuel intake, and a floor gear manipulator. Using a hook and loop climber was decided quickly as the most simple solution to the climbing challenge. They competed at the Suffield Scrimmage with a functioning gear manipulator and had the shooter running but not fully dialed in. The robot was officially named “Hatchet” do to the laser cut plywood shooting assembly.
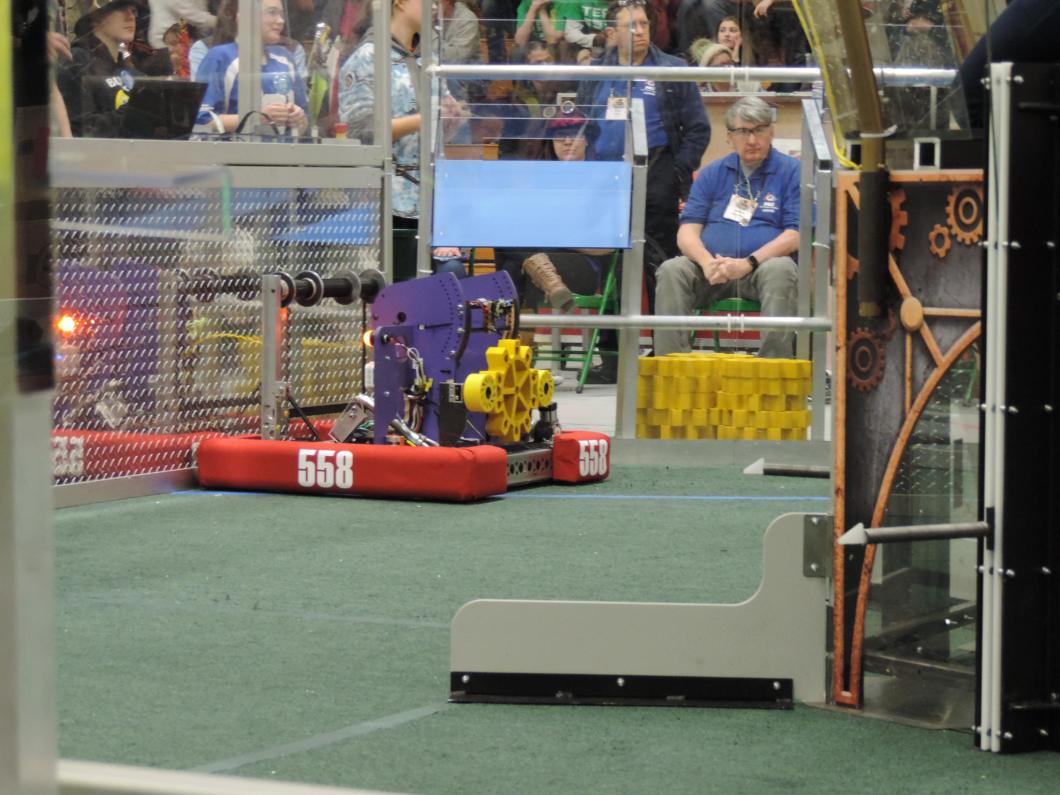
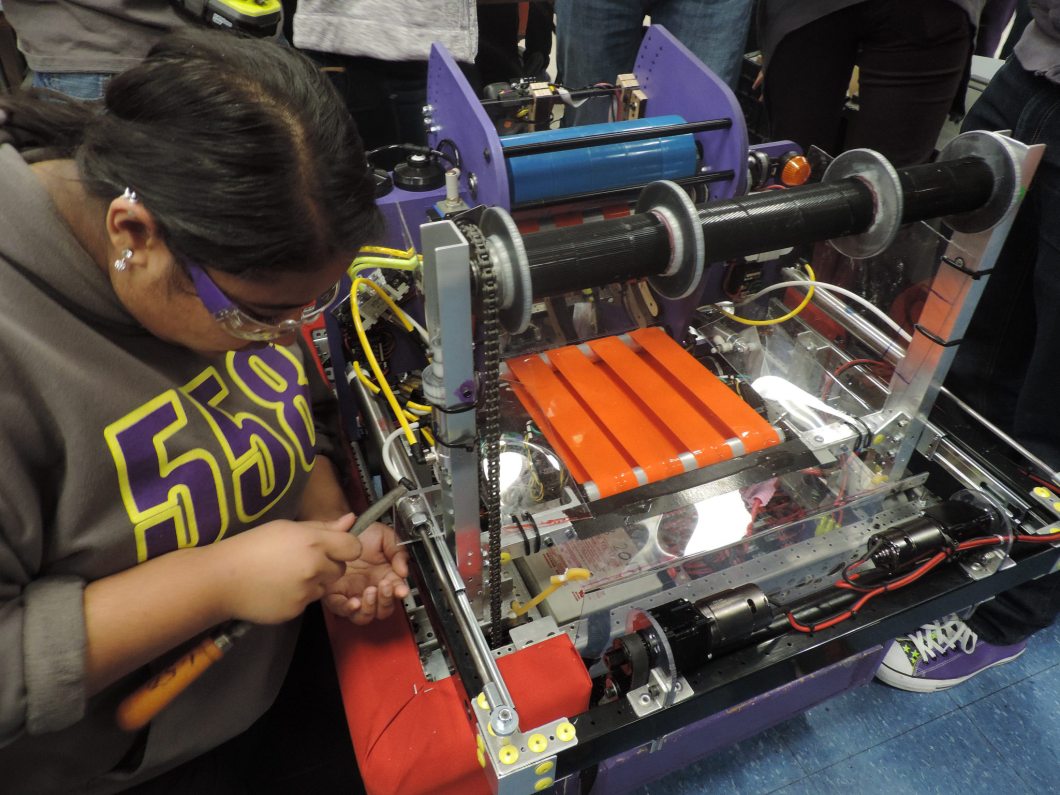 During the course of their first event (Week 1 – Waterbury NE District) they had a number of problems with power loss and full functionality. At the end of the first day the team made the choice to strip off anything on the robot that was not involved with climbing or scoring gears. The result is what you see below, the robot that our students renamed “Ratchet”. We were selected to play in the elimination rounds and the robot preformed well enough to score a decent amount of gears and climb.
During the course of their first event (Week 1 – Waterbury NE District) they had a number of problems with power loss and full functionality. At the end of the first day the team made the choice to strip off anything on the robot that was not involved with climbing or scoring gears. The result is what you see below, the robot that our students renamed “Ratchet”. We were selected to play in the elimination rounds and the robot preformed well enough to score a decent amount of gears and climb.
 This transformation from “Hatchet” to “Ratchet” and the success of being a gear runner sparked a large discussion with the team even before the awards ceremony. Jokes about building an entire new robot for the second year in a row began to turn into serious discussions. A mentor from another team even made a bet with the team that he would get a tattoo of a Brick if we actually went through with it. The team took a few days off to recover from the Week 1 district event and individually think about how to move forward for the teams Week 5 District in Hartford. The first meeting after every event we attend we do a post mortem where everyone participates in the discussion of the teams Successes, Failures, Experiences, and Need to Improve.
This transformation from “Hatchet” to “Ratchet” and the success of being a gear runner sparked a large discussion with the team even before the awards ceremony. Jokes about building an entire new robot for the second year in a row began to turn into serious discussions. A mentor from another team even made a bet with the team that he would get a tattoo of a Brick if we actually went through with it. The team took a few days off to recover from the Week 1 district event and individually think about how to move forward for the teams Week 5 District in Hartford. The first meeting after every event we attend we do a post mortem where everyone participates in the discussion of the teams Successes, Failures, Experiences, and Need to Improve.
The largest amount of time was spent discussing the Need to Improve. The result of that discussion was: we need to drop our bottom two priorities and become the best gear bot possible. The team then focused the next couple of days researching successful designs from other teams who had already competed or posted reveal videos. The most common team numbers that were discussed repeatedly were 5687, 4481, 180, and 340. Specifically 4481’s intake that could run over gears and get them into scoring position all inside the frame perimeter (which also lead to researching and talking with both them and 2200 about the design and development of this style intake). 5687’s gear placement, size and speed of field traversal. 180’s gear placement and climb. and 340’s placement ability and compactness.
The team then first set out to replicate (steal from the best, design the rest) the intake design from 4481/2200. In a few days the team had a plywood a polycarbonate prototype running (See Video Below) and began transferring the design into CAD and ordering final components.
Some final details on the gear intake power: dual 775pros through 10:1 Versaplanetaries with bevel gears to two 2″ diameter polyurethane rollers. Compression to the floor was 1/16″ of an inch. The final geometry of was determined by testing and based on the 4481 dual roller to get the gear to the right height, and the 2200 back plate and polycarbonate spring design, you can read more about that over on ChiefDelphi. Once this was completed they moved on to reviewing and designing a gear placement system like 5687/180 (See Video Below).
With the sizing of these two mechanisms determined, the chassis was then designed from our lessons learned on the multiple 2016 machines but sized in at 24″ x 24″ with 6wd. The size and materials in the chassis were selected to reduce weight as much as possible, keeping in mind the withholding allowance and the bag rules. 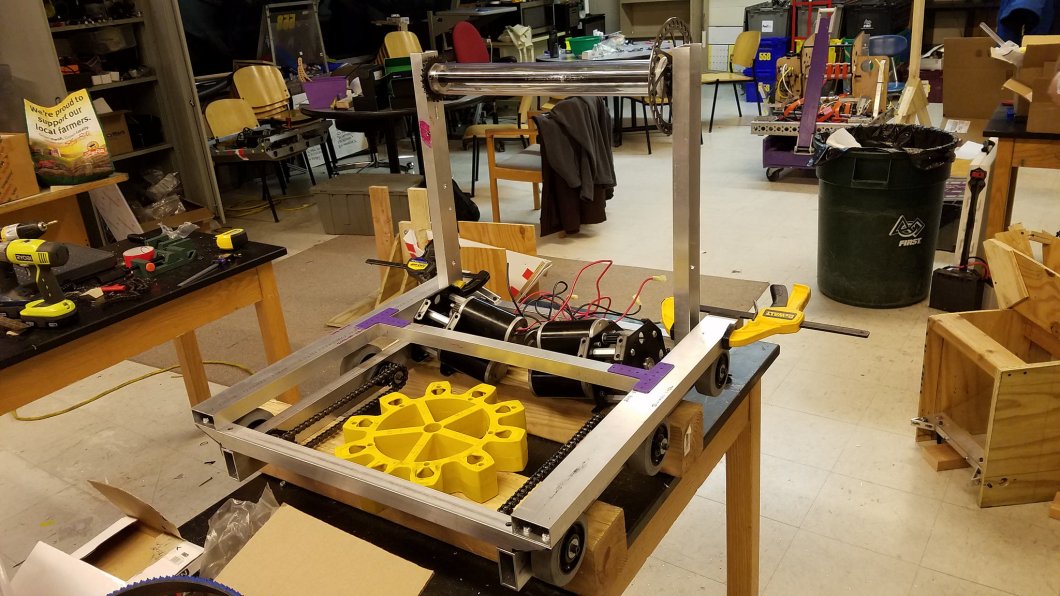
Staying under the 30 pound withholding allowance required some creative thinking. Below you can see the final chassis stripped down to an almost bare frame. Once we got this assembly below 30 pounds, we had to remake and assembly any additional components during the 6 hours of unbag time prior to competition or once we arrived at the venue. The second revision of the intake with active gear placement was 100% machined and assembled by the students during two, three-hour unbag times, and was placed back in bag. During the unbag time, another group of team members worked on a drop-in electronics panel using the components from “Ratchet” which was also kept in the bag.

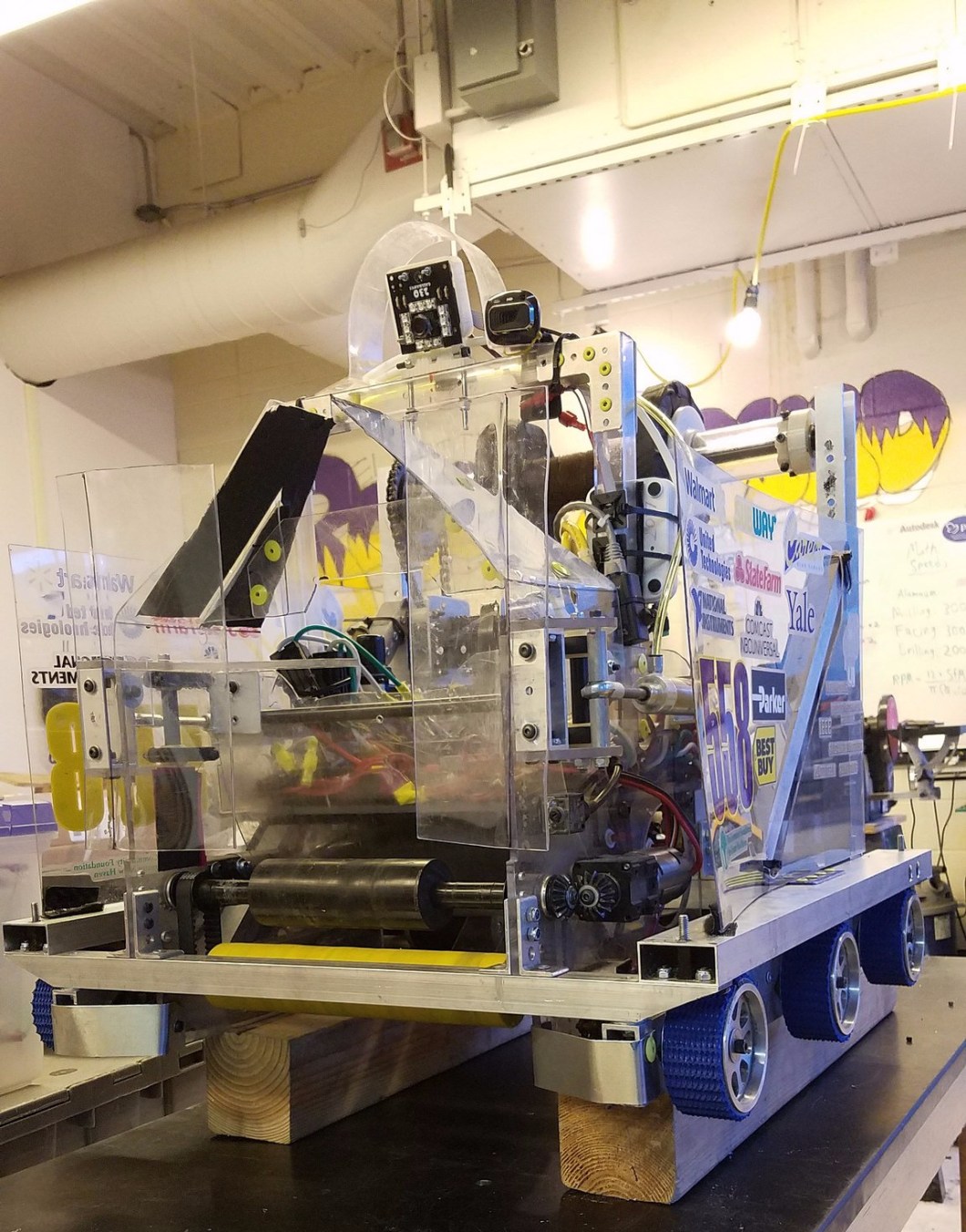
Onward to Week 5. Below is an image of what the robot looked like during load in at the Hartford District. The students got right to work on “Brick2.0”, first by removing the gearboxes from “Ratchet” (VexPro Single Reduction Single Speed 12:64), changing out the output sprockets (14:12 increase to the wheels), and installing them into the new chassis. Next the complete intake assembly was removed from the bag and installed into the chassis. The electronics panel and pneumatic system came next.

Before the first match of the competition the team had completed the rebuild, which we called re-bricking, and “Brick2.0” was ready to run. The next challenge was to learn how to use this new machine. “Brick2.0” is the fastest and lightest robot that 558 has ever built and the learning curve to drive it was steep. Thankfully our drivers had a number of hours on 195s practice field to shake down the chassis and first revision of the intake.
During this development time the drivers worked with the software team to make the robot more controllable. They settled on using a modified control layout using an Xbox controller. The right thumb stick was used for direction and the rear triggers were used for throttle. The interesting twist was that each throttle also flipped the steering, mean that the robot had two “fronts” which we called “gear side” or “climb side”. The bumpers were used for “quick turn” similar to Cheesy Drive.
So was the new robot worth the effort? Absolutely. The team went on to win the Hartford District, and followed that up with a solid performance at the NEDCMP. On Archimedes, 558 was the only team to hit four rotors in all of our matches in qualifications, and was a finalist on Archimedes thanks to their gear running ability and their alliance partners.
The bigger implication is that 558 has managed to field two entirely different machines, two years in a row, and all within the rules. This calls into question the bag and tag rules as well as the withholding allowance. It may be a controversial topic but 558 is firmly on the side of getting rid of both rules.

[…] on the pegs, which lead them to some offseason success. A keen eye may notice some similarity to 558’s in-season rebuild that we covered then on the blog though. After all, steal from the best and invent the […]